Реферат: Двигатели постоянного тока
Двигатели постоянного тока используются в прецизионных приводах, требующих плавного регулирования частоты вращения в широком диапазоне.
Свойства двигателя постоянного тока, так же как и генераторов, определяются способом возбуждения и схемой включения обмоток возбуждения. По способу возбуждения можно разделить двигатели постоянного тока на двигатели с электромагнитным и магнитоэлектрическим возбуждением.
Двигатели с электромагнитным возбуждением подразделяются на двигатели с параллельным, последовательным, смешанным и независимым возбуждением.
Электрические машины постоянного тока обратимы, то есть, возможна их работа в качестве двигателей или генераторов.
Например, если в системе управления с использованием генератора в обратной связи отсоединить генератор от первичного двигателя и подвести напряжение к обмоткам якоря и возбуждения, то якорь начнет вращаться и машина будет работать как двигатель постоянного тока, преобразуя электрическую энергию в механическую. Двигатели независимого возбуждения наиболее полно удовлетворяют основным требованиям к исполнительным двигателям самоторможение двигателя при снятии сигнала управления, широкий диапазон регулирования частоты вращения, линейность механических и регулировочных характеристик, устойчивость работы во всем диапазоне вращения, малая мощность управления, высокое быстродействие, малые габариты и масса.
Однако двигатели постоянного тока имеют существенные недостатки, накладывающие ограничение на область их применения малый срок службы щеточного устройства из-за наличия скользящего контакта между щетками и коллектором, скользящий контакт является источником радиопомех.
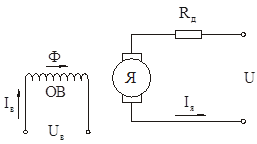
Рис. 1.1. Структурная схема двигателя независимого возбуждения
Подставим в уравнение второго закона Кирхгофа для якорной
цепи ![]() и
и ![]() получим
получим
![]() ,
,
![]() ,
,
где ![]() - якорное сопротивление,
- якорное сопротивление, ![]() - добавочное сопротивление.
- добавочное сопротивление.
Электродвижущая сила (ЭДС) якоря - ![]() пропорциональна угловой
скорости -
пропорциональна угловой
скорости - ![]() , связь между ЭДС и угловой
скоростью, а так же между вращающим моментом
, связь между ЭДС и угловой
скоростью, а так же между вращающим моментом ![]() и
и
![]() в системе единиц СИ
определяется единым электромагнитным коэффициентом
в системе единиц СИ
определяется единым электромагнитным коэффициентом
![]() ,
,
где ![]() -
число пар полюсов двигателя,
-
число пар полюсов двигателя, ![]() - число
проводников обмотки якоря,
- число
проводников обмотки якоря, ![]() - число
пар параллельных ветвей обмотки якоря,
- число
пар параллельных ветвей обмотки якоря, ![]() -
магнитный поток.
-
магнитный поток.
Причем
![]() ,
,
где ![]() -
конструктивный коэффициент.
-
конструктивный коэффициент.
![]() ,
,
![]() ,
,
тогда E якоря
![]() ,
,
а момент
![]() ,
,
и напряжение, подаваемое на двигатель
![]() ,
,
откуда
![]() ,
,
механическая характеристика двигателя постоянного тока записывается в виде
![]() .
.
Следовательно, механическая характеристика при Ф = const представляет собой прямую линию. Угловую скорость, соответствующую при М = 0 и номинальном напряжении - Uном запишем в виде
![]() .
.
Эту скорость называют угловой скоростью идеального холостого хода.
![]() ,
,
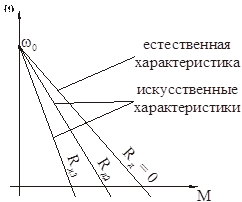
Рис. 1.2. Механические характеристики в двигательном режиме
Рассмотрим установившиеся режимы работы двигателя постоянного тока для случая соответствующего постоянному моменту сопротивления.
Такая схема нагружения двигателя постоянного тока соответствует подъему или спуску постоянного груза.
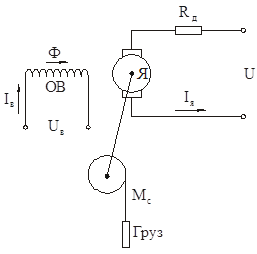
Рис. 1.3. Структурная схема нагружения двигателя постоянного тока для постоянного момента нагружения
Рассмотрим обобщенные механические характеристики двигателя постоянного тока
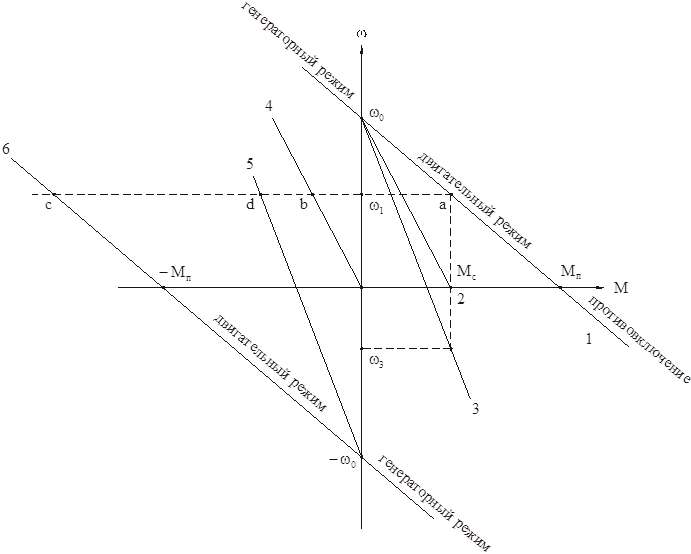
Рис. 1.4. Механическая характеристика двигателя постоянного тока
В первом квадранте двигатель постоянного тока находится в двигательном режиме и потребляет энергию из сети. При вращении якоря со скоростью w>w0 двигатель постоянного тока переходит из двигательного режима с моментом М>0 (первый квадрант) в генераторный режим (второй квадрант) с отрицательным вращающим моментом (якорь вращается перпендикулярно, например, под действием инерции исполнительного механизма). При этом момент М<0 и Iя<0, т.е. двигатель постоянного тока отдает энергию в сеть.
Положив в выражение для механической характеристики w=0 и R=Rя, U=Uном, получим пусковой момент
![]() .
.
Так как пусковой ток
![]() ,
,
то
![]() .
.
При включении двигателя без добавочного резистора (естественная характеристика - 1) груз поднимается со скоростью двигателя w1. При включении добавочного резистора (искусственная характеристика - 2) груз не подвижен (w2=0). При работе двигателя в режиме, определяемом характеристикой 3, груз опускается со скоростью w1, искусственная характеристика 4 соответствует режиму динамического торможения, заключающемуся в отсоединении якорной цепи от источника и замыкании ее на добавочный резистор, характеристика 5 аналогична характеристике 2, но напряжение U=Uном, характеристика 6 параллельна характеристики 1 и соответствует во втором квадранте противовключению при подаче напряжения U=Uном.