Реферат: Изучение свободных колебаний и измерение ускорения свободного падения
измерение ускорения сободного падения
Цель работы : изучение свободных колебаний математического маятника и физического маятника (оборотного маятника Кэтера) и определение ускорения свободного падения .
Оборудование : комбинированная лабораторная установка , масштабная линейка , секундомер.
1.Теоретическая часть.
1.1. Гармонические колебания и их характеристики.
Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напряжение и ток в цепи. Физическая природа колебаний может быть разной, поэтому различают колебания механические, электромагнитные и др. Однако различные колебательные процессы описываются одинаковыми характеристиками и одинаковыми уравнениями.
Колебания называются свободными или собственными, если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на систему, совершающую колебания. Простейшим типом колебаний являются гармонические колебания- колебания, при которых физическая величина изменяется во времени по закону синуса или косинуса. Рассмотрение гармонических колебаний важно по двум причинам:
1) колебания, встречающиеся в природе и технике, частно имеют характер, близкий к гармоническому;
2) различные виды колебаний можно представить как наложение гармонических колебаний.
Гармонические колебания некоторой величины описываются уравнением типа
x(t)=A cos(w0t+j0) (1a)
или
x(t)=A sin(w0t+j0), (1б)
где x(t)- мгновенное значение колеблющейся величины в момент времени t, называемое отклонением, A- максимальное значение колеблющейся величины, называемой амплитудой колебаний, w0- круговая (циклическая) частота свободных колебаний и j = (w0 + j0) - фаза колебаний в момент времени t, j0 - начальная фаза колебаний. Фаза характерезует мгновенное состояние колебательной системы и определяется отклонением или смещением x и величиной времени t. Так как косинус и синус изменяются в пределах от +1 до –1, то x может принимать значения от +A до –A. Определение состояния системы, совершающей гармонические колебания, повторяются через промежуток времени T, называемый периодом колебания. За промежуток времени T фаза колебания получает приращение 2П, т.е. (w0(t+T)+j0))-(w0t+j0) = 2П. Откуда
T = 2П/w0. (2)
Величина, обратная периоду колебаний:
v = 1/T, (3)
определяет число колебаний, совершаемых в единицу времени, и называется частотой колебаний. Сравнивая (2)и(3), получим
w0 = 2Пv. (4)
Единица частоты – герц (Гц): 1 Гц – частота периодического процесса, при которой за 1 с совершается одно полное колебание.
Первая и вторая производные отклонения x(t) (скорость v и ускорение a) также изменяются по гармоническому закону :
dx/dt = v(t) =-Aw0sin(w0t+j0) = Aw0cos(w0t+j0+p/2) (5a)
(5б)
т.е. имеет гармонические колебания, происходящие с той же циклической частотой. Амплитуда величин (5а) и (5б), соответственно, равны Aw0 и Aw0. Фаза колебаний ускорения (5а) отличается от фазы колебаний самой величины (1а) на П/2, а фаза колебаний ускорения (5б)- на П. Следовательно, в момент времени , когда x=0, v=dx/dt приобретает наибольшие положительное или отрицательное значения. Когда x достигает “-“ или “+” max значения, величина a=dx/dt приобретает соответственно “+” или “-“ наибольшее значение.
Из (5б) следует дифференциальное уравнение гармонических колебаний
(6)
где учтено, что x=Acos(w0t+j0). Решением уравнения (6) и является выражение (1).
1.2 Механические гармонические колебания
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль координат X около положения равновесия, принятого за начало координат. Тогда зависимость координаты x от времени t задается ур-ем (1а):
x(t)= Acos(w0t+j0). Согласно выражениям (5а) и (5б) скорость v(t) и ускорение a(t) колеблющейся точки соответственно равны: v(t)=A w0 cos(w0t+j0+p/2), a(t)=Aw0 cos(w0t+j0+p).
Сила F=ma, действующая на колеблющуюся материальную точку массой m, с учетом выражений для x(t) и a(t) равна
F=-m w0 x. (7)
Следовательно, сила пропорциональна смещению материальной точки из положения равновесия и направлена в противоположную сторону.
Кинетическая энергия материальной точки, совершающей прямолинейные гармонические колебания, равна
(8а)
или
(8б)
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы, равна
(8в)
или
(8)
Полная энергия колеблющейся точки:
(9)
Изформул (7б) и (8б) следует, что кинетическая и потенциальная энергии колебдющегося тела изменяются с частотой 2w0 . Из анализа выражения (9) следует, что полная энергия колеблющейся точки есть величина постоянная.
1.3.Физический и математический маятники
Примерами тел, совершающих гармонические колебания, могут служить физический и математический маятники.
1.3.1 Фический маятник
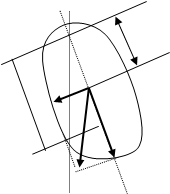
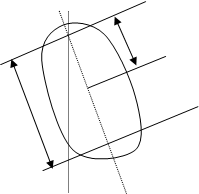
Физический маятник – твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси О подвеса, не проходящей через центр масс С тела (рис.1).
Если маятник отклонен от положения равновесия на некоторый угол, то в соответствии с уравнением динамики вращательного движения твердого тела (e = M/J, где e - угловое ускорение тела, M –момент сил, действующих на тело, J –момент инерции тела относительно оси вращения) момент возвращающей силы F можно записать в виде
(10)
где M = Ftl=-mgl sina =-mgla, J-момент инерции маятника относительно оси, проходящей через точку О, l-расстояние меду точкой подвеса и центром масс маятника С, Ft = -mg sina== -mga – возращающаяся сила и g –ускорение свободного падения.
Уравнение (10) можно записать в виде
(11)
или
(12)
Принимая
(13)
получим уравнение
(14)
решение которого известно как:
(15)
Из выражения (15) следует, что при малых колебаниях физический маятник совершает гармонические колебания с циклической частотой w0 и периодом
(16)
где L=J/(ml) –приведенная длина физического маятника.
Тока О' на продолжении прямой ОС, отстоящая от оси подвеса на расстоянии L, называется центром качаний физического маятника (см. рис.1). Применяя теорему Штейнера, можно показать, что ОО’ всегда больше ОС=l . Точка подвеса О и центр качаний О’ обладают свойством взаимозаменяемости : если ось подвеса сделать проходящей через центр качаний О’, то точка О прежней оси подвеса станет новым центром качаний. При этом период колебаний физического маятника не изменится, а расстояние между точками подвеса будет равно приведенной длине маятника.
`P=m`g
Рис. 1
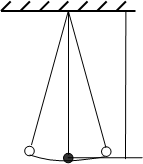
1.3.2. Математический маятник
Математический маятник –идеализированная система, состоящая из материальной точки массой m, подвешенной на невесомой нерастяжимой нити, и колеблющаяся под действием силы тяжести.
Момент инерции математического маятника J =ml, где l- длина маятника. Так как математический маятник можно представить как частный случай физического маятника, предположив, что вся масса физического маятника сосредоточена в одной точке – центре масс, то, подставив выражение момента инерции математического маятника в формулу (16), получим известное выражение для малых колебаний математического маятника.
(17)
Сравнивая формулы (16) и (17) видим, что, если приведенная длина физического маятника равна длине математического маятника, то их периоды колебаний одинаковы. Следовательно, приведенная длина физического маятника – это длина такого математического маятника, период колебаний данного физического маятника.
l
m
Рис.2
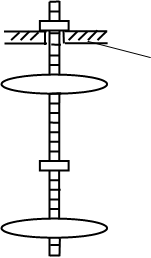
1.3.3 Оборотный маятник
Оборотный маятник является частным случаем физического маятника и состоит из стального стержня 2,двух легких опорных призм 3 и двух массивных грузов 1, имеющих форму чечевиц (рис.3). Призмы и чечевицы могут перемещаться по стержню и фиксироваться с помощью винтов. Если маятник вывести из положения равновесия то он будет совершать колебания в вертикальной плоскости, опираясь нижним ребром одной из призм на закрепленную на массивном штативе опорную площадку 4.
Соотношение T = 2p J/mgl (см. Формулу (16)) может быть использовано для определения ускорения силы тяжести g. Для этого необходимо измерить период колебания маятника T, расстоние l между осью качания и центром масс, определить момент инерции маятника J относительно оси качания и выразить через них g. Оказывается, однако, что с высокой точностью можно измерить только период колебаний Т маятника, а величины l и J достаточно точно определить не удается. Например, для нахождения расстояния l от оси качаний до центра масс маятника необходимо предварительно определить положение центра масс, что сделать точно довольно трудно.
![]() 3
3
4
![]()
1
![]()
![]() 3
3
![]() 1
1
![]()
![]() x
x
![]()
Рис.3
Достоинством метода оборотного маятника для определения ускорения свободного падения является то, что величины J и l не входят в расчетную формулу для g. Перейдем к обсуждению этого метода. Согласно теореме Гюйгенса-Штейнера, момент инерции физического маятника относительно оси качаний О (рис.1)
J = Jc + ml (18)
Где Jc –момент инерции маятника относительно оси, параллельной оси качаний и проходящей через центр масс С маятника, l-расстояние между осью О и центром масс С. Подставляя выражение (18) в (16), получаем
(19)
Обсудим, качественно, характер зависимости периода колебаний от расстояния l
между центром масс и осью качаний. При очень малых l момент
силы тяжести М=- mgl
sina (рис.1), стремящийся
вернуть маятник в положение равновесия, становится очень малым и период
колебаний резко возрастет. В пределе l ®0, момент силы
тяжести равен нулю и колебания вообще невозможны: маятник
находится в состоянии раавновесия. Это согласуется с формулой (19): при
l ®0
период
(20)
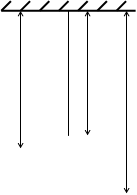
В обратном пределе, для очень больших l , можно пренебречь Jc по сравнению с ml и рассматривать физический маятник как математический с длиной подвеса l. В этом случае период колебаний Т= При l период Т также неограниченно возрастает. При возрастании l период T сначала убывает до некоторого минимального значения Tm=Tmin, а затем вновь возрастает. Качественно вид зависимости T(l) изображен на рис.4.
Значению l=0 соответствует центр масс маятника. Если маятник подвешивать по другую сторону от центра масс, то, как видно из формулы (19), зависимость T(l) будет точно такой же. Поэтому график T(l) имеет две симметричные ветви, соответствующие положению точки подвеса маятника слева или справа от его центра масс.
![]() T
T
 |
|||
 |
|||
T
![]()
![]()
![]()
![]()
Tm
![]() lm l1 0 lm l2 l
lm l1 0 lm l2 l
Рис.4
Из графика видно, что по каждую сторону от центра масс маятника имеется по две точки подвеса, для которых периоды колебания маятника совпадают.Найдем такие два положения l1 и l2(l2=l1) точек подвеса по разные стороны от центра масс (рис.5), чтобы периоды колебаний маятника совпадали:
T(l1) = T(l2). (21)
Как видно из (19), для этого необходимо выполнение равенства
Jc/ml1+l1= Jc/ml2+l2 (22)
которое имеет место либо при l1 = l2, либо при
l2 = Jc/ml1 (23)
В последнем случае период колебаний маятника
(24)
Следовательно, ускорение свободного падения может быть определино по формуле
(24)
Как видно из (24), для нахождения g достаточно измерить только две величины: расстояние L=(l1+l2) между точками подвеса маятника (опорными ребрами призм) и период колебаний маятника в положении l1 и в “перевернутом положении” l2, таком, что l1¹l2. При этом периоды колебаний должны совпадать, т.е. должно выполняться условие T(l1)=T(l2)=T. Напомним, что в этом случае величина L=(l1+l2) называется приведенной длиной маятника.
![]()
L
Рис.5
2. Экспериментальная часть
2.1. Описание установки
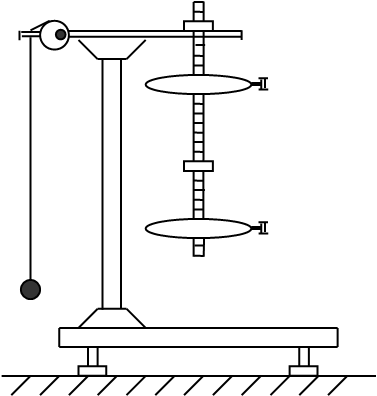
Комбинированная лабораторная установка позволяет проводить исследование свободных колебаний двух типов маятников: математического и физического. В качестве физического маятника применяется маятник Кэтера.
Установка (рис.6) состоит из горизонтальной подставки 2, на которой закреплена вертикальная стойка 5. На верхнем торце стойки жестко закреплен горизонтальный кронштейн 8. Четыре ножки винта 1 позволяют устанавливать подставку в горизонтальном положении. С одной стороны кронштейна находится барабан 11, который может вращаться с небольшим усилием с помощью ручки 10. Тонкая нить, немотанная еа барабан , пропущена через неболльшое отверстие в кронштейне. На конце нити закреплен стальной шарик 3 небольшого радиуса . Шарик , подвешанный на нити , можно рассмстривать как математический маятник , совершающий колебания в вертикальной плоскости . Длину нити, а тем самым и длину маятника, можно менять, вращая барабанчик.
11
 10
10
![]() 9
9
![]()
![]()
![]()
![]()
![]()
![]()
![]() 6
6
8
![]() 4
4
![]() 7
7
![]() l 6
l 6
![]() 5
5
![]() 4
4
3
![]() 2
2
![]() 1
1
Рис.6
С противоположной стороны кронштейна в специальном гнезде подвешан оборотный маятник . Он состоит из тонкого стального стержня 9, по которому можно перемещать две массивные чечевицы 4 и две легкие опорные призмы 6. Опорные призмы и чечевицы фиксируются на стержне с помощью винтов. Правильное взаимное расположение опорных призм и чечевиц на стержне приведено на рисунке 6. Нанесенные на стержень деления(цена деления – 1,0см) позволяют определять положения призмы и чечевиц на стержне. Маятник может совершать колебания в вертикальной плоскости.
Колебания как математического, так и оборотного маятников будут гармоническими, если амплитуда колебаний не будет превышать нескольких градусов (4 – 6)
2.2. Определение ускорения силы тяжести с помощью математического маятника
2.2.1. Вывод рабочей формулы
Длина маятника равна расстоянию от точки подвеса до центра тяжести шарика ,поэтому непосредственно измерить длину маятника достаточно сложно. Как видно из рис.7 длина маятника l = l0 + r, где r –радиус шарика. При измерении ускорения силы тяжести поступают следующим образом: измеряют с помощью линейки расстояние h от основания подставки до шарика и диаметр шарика 2r. Длина маятника, как видно из рисунка, l = H-h-r. Затем определяют периоды свободных колебаний T1 и T2 маятников двух различных длин: l’ и l”. Из формулы (17) имеем
l l0 H
![]()
![]() 2r
2r
![]()
![]() h
h
Рис.7
Вычитая из второго выражения первое получим:
Таким образом, для определения g необходимо измерить лишь разности длин маятников.Причем
l“-l’=h’-h”. При таком способе исключается необходимость определения центра качания маятника.
2.2.2.Порядок выполнения задания
1.Установить длину маятника.
2.Измерить с помощью масштабной линейки расстояние h’ от нижнего края шарика до горизонтальной подставки.
3.Отвести шарик от положения равновесия на небольшой угол (около 4-5), отпустить шарик, предоставив ему возможность свободно колебаться. В момент наибольшего отклонения маятника пустить секундомер и отсчитать время t1, в течение которого маятник совершит n=50 полных колебаний. Измерение времени 50 колебаний для длины маятника l’ выполнить три раза. Результаты измерений записать в таблицу 1.
4.Установить новую длину маятника l”. Измерить расстояние h” от нижней кромки шарика до горизонтальной подставки. Отсчитать время t2, в течение которого маятник совершит n=50 полных колебаний. Измерение времени 50 колебаний для маятника l” выполнить три раза. Результаты измерений записать в таблицу 1.
5. По результатам измерений t времени полных колебаний рассчитать периоды колебаний T1 и T2 по формуле T= t/n. Рассчитать средние значения T1 и T2.
6. Вычислить ускорение силы тяжести и оценить погрешность измерений. Результаты вычислений занести в таблицу 1. Таблица 1.
№ п/п h’, h”,мм n t1,t2,с T1,T2,c T1ср,T2ср,с g,м/с
2.3.Определение ускорения силы тяжести методом оборотного маятника.
Чтобы определить ускорение силы тяжести с помощью оборотного маятника , необходимо измерить приведенную длину маятника. Напомним, что, если периоды колебаний физического маятника для двух точек подвеса равны , то расстояние между точками подвеса равно приведенной длине. Т.о., необходимо подобрать такие положения чечевиц и опорных призм, чтобы периоды колебаний для двух точек подвеса были равны. Возможны два варианта.
В первом случае чечевицы не перемещают. Перемещая опорные призмы, подбирают такие положения, чтобы периоды колебаний были равны. Обычно достаточно перемещать только одну призму. Во втором случае призмы и одна из чечевиц неподвижны. Перемещая вторую чечевицу, находят такое ее положение, когда периоды для двух точек подвеса также совпадают. Как правило, при выполнении задания используют второй вариант.
1.Закрепить чечевицы на стержне в несимметричном положении: одну чечевицу –на расстоянии
1-2 см от конца стержня, вторую чечевицу –вблизи центра стержня. В этом случае центр масс маятника находится между чечевицами и смещен относительно середины стержня.
2.Измерить расстояние х от конца стержня до плоскости призмы. Отвести маятник от положения равновесия на небольшой угол (около 4-5), и отпустить, предоставив ему совершать свободные колебания. В момент наибольшего отклонения маятника пустить секундомер и отсчитать время
t, в течение которого маятник совершит n=50 полных колебаний. Результаты измерений записать в таблицу 2.
3.Перевернуть маятник и подвесить на вторую призму. Выполнить пункт 2.
4.Передвинуть чечевицу, находящуюся у конца стержня, на 1см и выполнить пункт 2. Перевернуть маятник и выполнить пункт 2.
5.Повторить пункты 3 и 4, передвигая чечевицу с шагом 1 см, 9-10 раз.
6.Рассчитать периоды колебаний маятника для двух точек подвеса при разных положениях чечевицы. Построить график зависимостей периодов колебаний маятника от положения чечевицы для обеих точек подвеса.
7.Из графика найти положение чечевицы, при котором периоды колебаний равны для двух точек подвеса. Измерить расстояние между точками подвеса. Измеренное расстояние будет равно приведенной длине маятника для такого положения чечевицы, при котором для обеих точек подвеса периоды равны. Из графика определить период колебаний (T=T1=T2).
8.По формуле (16) определить ускорение силы тяжести и оценить погрешность измерений.
Таблица 2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
№ п/п Положение Первая точка подвеса Вторая точка подвеса
![]()
![]()
![]()
![]() чечевицы, n
чечевицы, n
x, см t0, с T1, с t2,с T2, с
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()