Реферат: Сканирующая зондовая микроскопия
Содержание
Содержание 1
1.ВВЕДЕНИЕ. 2
2.ОСНОВНАЯ ЧАСТЬ. 2
2.1 Что такое сканирующая зондовая микроскопия. 2
2.2 Современные методы исследований СЗМ. 5
2.2.1 Методики СТМ. 5
2.2.1.1 Объекты исследования. 6
2.2.1.2 Режимы работы СТМ. 7
Режим топографии (I=сопst). 7
Режим регистрации тока (Z=const). 7
Режим ошибки обратной связи (FВ-еrrоr). 8
2.2.2 Методики ССМ . 8
2.2.2.1 Контактный режим. 9
Силы, действующие между кантилевером и образцом 10
2.2.2.2 Топография
поверхности (режим постоянной 11
силы)
2.2.2.3 Режим снятия изображения сил. 15
2.2.2.4 Режим регистрации ошибки обратной связи. 16
2.2.2.5 Измерение боковых сил. 16
2.2.3 Вибрационные и
модуляционные методы
измерений. 17
2.2.3.1 СТМ-методы. 18
Режим измерения локальной высоты барьера. 18
Режим спектроскопии. 20
2.2.3.2 АСМ-методы: 20
Бесконтактный режим. 20
Полуконтактный режим. 22
Режим измерения жесткости. 23
2.2.4 Схема взаимодействия компонентов. 24
2.2.5 Схема регистрации отклонения кантилевера. 25
3. ЗАКЛЮЧЕНИЕ. 26
4. ЛИТЕРАТУРА. 27
1.Введение
Сканирующий Зондовый Микроскоп (СЗМ) - это прибор, дающий возможность исследования свойств поверхностей материалов от микронного до атомарного уровня. В СЗМ существует три способа исследования поверхностей:
· Сканирующая туннельная микроскопия (СТМ)
· Сканирующая силовая микроскопия (ССМ)
· Близкопольная сканирующая микроскопия (БСМ).
СТМ был изобретен сотрудниками швейцарского филиала фирмы IВМ учеными Г.Биннигом и X. Рорером в 1981 г., а ССМ - Кэлвином Гвэйтом, Гердом Биннигом и Кристофером Гербером, в 1986г. Эти технологии оказались революционными в развитии исследований свойств поверхностей и в 1985 изобретение СТМ было отмечено присуждением нобелевской премии по физике первооткрывателям - Г. Биннигу и X. Рореру.
2.Основная часть
2.1 Что такое Сканирующая Зондовая Микроскопия
В работе СТМ используется заостренная проводящая игла с приложенным напряжением смещения между ней и образцом; радиус кривизны иглы порядка 3 - 5 нм. При подводе иглы на расстояние около 10А от образца, электроны из образца начинают туннелировать через туннельный промежуток в иглу (или наоборот, в зависимости от знака приложенного напряжения смещения). Туннельный ток используется как механизм для получения картины исследуемой поверхности. Для его возникновения необходимо, чтобы образец и игла были проводниками либо полупроводниками. Для различных режимов сканирования записываемый (т.е. формирующий изображения) сигнал получается из величины туннельного тока различными методами. На Рис. 1 показана схема туннелирования электрона между образцом и зондом и приближении простейшей одномерной модели:
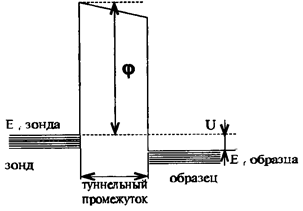
РИС. 1
 |
Величина туннельного тока может быть оценена по ф-ле:
Z - высота иглы относительно образца;
U – разность потенциалов энергетических уровней;
Fi- высота потенциального барьера;
Регистрируемой величиной является либо величина тока (Если поверхности иглы и образца являются гидрофобными, а таковыми их можно сделать, покрыв SiCl2, то регистрируется действительно величина туннельного тока между иглой и образцом, в случае же гидрофильности поверхностей иглы и образца на них возможна адсорбция, и тогда результирующий ток будет состоять из вкладов туннельного и ионного токов.)
,либо величина напряжения обратной связи, поддерживающей постоянный туннельный ток. Из этой формулы видно, что величина It экспоненциально зависит от величины туннельного промежутка и именно это свойство позволяет достичь столь высокого разрешения туннельной микроскопии.
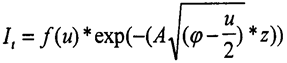
На величину It влияют также другие потенциальные, барьеры, которые могут возникнуть при исследовании реальных поверхностей. Например, если исследуемая поверхность покрыта какой-либо неоднородной пленкой (это может быть слой окислов, адсорбаты или специально нанесенная пленка, то схема туннелирования будет выглядеть следующим образом
 |
(Рис. 2).
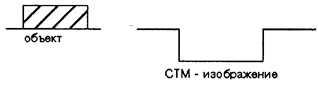 |
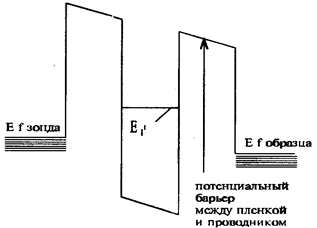
Очевидно, что наличие различных объектов между зондоми проводящей поверхностью будет существенно влиять на вероятность туннелирования и, соответственно, на величину туннельного тока. Это в некоторых случаях может мешать получить рельеф проводника а в некоторых случаях позволяет исследовать свойства пленок, нанесенных на проводящую подложку СТМ-изображение определяется как рельефом исследуемой поверхности так и ее лектронными свойствами. Если исследуется либо загрязненная поверхность, либо специально нанесенные объекты на проводящую подложку, то СТМ-изображение определяется не только рельефом исследуемого образца, но и локальными электронными свойствами поверхности. Например, участок проводника, покрытый неэлектропроводной пленкой, может выглядеть на СТМ изображении как провал, хотя на самом деле, это может быть выступ (Рис.3).
(Рис. 3).
Также при исследовании атомарно - гладких поверхностей положение пинов на изображении может не совпадать с положением атомов.
Таким образом, результаты СТМ-исспедований неоднородных поверхностей нельзя рассматривать как изображения рельефа поверхностей, следует иметь в виду, что на истинный рельеф как бы накладывается карта локальных электронных свойств объекта исследования и эта информация может оказаться весьма полезной.
В приборе предусмотрены дополнительные возможности анализа локальных электронных свойств поверхности. Это измерение зависимостей It(Ut) и I(Z) и сканирование распределения величин dI/dU и dI/dz по поверхности образца. Эти характеристики могут дать дополнительную информацию об электронных свойствах поверхности, неоднородностях этих свойств, наличии резонансных уровней туннелирования. Зависимость I(Z) применяется, также, для определения качества иглы
Сканирующие Зондовые Микроскопы российской компании НТ-МДТ моделей Р4-8РМ-16 и Р4-ЗРМ-18 дают возможность использовать практически все современные методики измерений, работая в режимах СТМ, ССМ и БСМ. Выбор методики измерения определяется свойствами исследуемого объекта и задачами пользователя (см. пункт 2.2).
2.2.Современные методы исследований СЗМ
2.2.1.Методики СТМ
| Методика | Особенности |
| Стандартная | Получение изображения рельефа (Следует иметь в виду, что в режиме СТМ картина рельефа поверхности по сути дела определяется условиями возникновения туннельного тока, величина которого является функцией не только расстояния, но и электронных свойств поверхности) проводящей поверхности или картины распределения туннельного тока при постоянной высоте иглы. |
| Литография | локальное воздействие на поверхность импульсами напряжения. Служит для изменения рельефа, физических и химических свойств проводящих поверхностей или пленок на поверхности. |
| Сканирующая Туннельная Спектроскопия (СТС) | измерение вольтамперных характеристик в заданных точках поверхности или регистрация распределения по поверхности величины dI/dU, содержащей информацию о локальной спектральной плотности электронных состояний. Прибор можно запрограммировать на снятие кривых I-U в каждой точке области и из собранных данных получить трехмерную картину электронной структуры области. Все указанные методы предназначены для зондирования локальной электронной структуры поверхности с использованием СТМ |
| Измерение локальной высоты потенциального барьера | измерение зависимости I(z) туннельного тока от величины туннельного зазора или регистрация распределения по поверхности величины dI/dz, содержащей информацию о локальной высоте потенциального барьера (локальной работе выхода электронов) |
2.2.1.1 Объекты исследования
Сканирующая туннельная микроскопия может быть применена для исследования поверхностей проводников и тонких пленок (или небольших объектов), нанесенных на поверхность проводника. Например, это могут быть поверхности благородных металлов или графита(НОРG). Они же обычно используются и как подложки для нанесения других объектов, исследуемых методами СТМ, Что касается остальных проводников, то большинство из них на воздухе не только покрываются адсорбатами, но и окисляются. Вероятность туннелирования электронов сквозь них может быть весьма мала (из-за толщины слоя, либо из-за его электронных свойств). На таких материалах туннельная микроскопия не позволяет получать хорошего разрешения. Например, кремний может исследоваться методами СТМ с атомарным разрешением только в высоком вакууме. Для исследования поверхностей таких веществ с помощью СТМ иногда могут быть применены методы пассивирования поверхности.
Что касается исследований свойств пленок на поверхности проводника то задачу применимости СТМ приходится решать в каждом конкретном случае. Причем полученные результаты могут зависеть не только от свойств материала, но и от свойств подложки, и от метода нанесения. Например, СТМ успешно применяется для исследований ЛБ пленок, а также некоторых биологических объектов (молекул и даже вирусов).
2.2.1.2 Режимы работы СТМ
При работе СТМ, как уже говорилось, измеряется It в процессе сканирования зондом над поверхностью исследуемого образца. На основании этого сигнала прибор в различных режимах позволяет получать различные данные.
Режим топографии (I=соnst)
Наиболее часто используется режим топографии.
В этом режиме ОС поддерживает I=соnst, изменяя высоту иглы Z относительно образца. Например, когда прибор регистрирует увеличение туннельного тока, он изменяет напряжение, приложенное к пьезоэлектрическому сканеру, отдаляя иглу от образца. При этом получается изображение некой поверхности и рельеф (для однородных поверхностей) соответствует истинному рельефу поверхности. На изображении высоты будут указаны в единицах длины. В этом режиме параметры сканирования устанавливаются таким образом, чтобы It(контролируемый по осциллографу или но картине распределения сигнала ошибки обратной связи) изменялся как можно меньше. Если туннельный ток поддерживается постоянным в пределах нескольких процентов, то расстояние игла-образец будет постоянным с точностью до нескольких сотых долей ангстрема.
Режим регстрации тока (Z=const)
Следующий режим: Z=const. При этом режиме сканирование осуществляется с выключенной ОС при постоянном Z, полученное изображение - это изменение It в зависимости от положения зонда. Игла движется над образцом, сохраняя постоянное расстояние до его основания (но не до поверхности), при этом меняется туннельный ток. Значения туннельных токов, измеренные в каждой точке поверхности образца представляют собой набор данных, отображающих топографию поверхности (в предположении постоянства плотности поверхностных состояний). В этом режиме можно быстро сканировать, но существует опасность касания иглой поверхности, что может привести к разрушению острия зонда
Режим ошибки обратной связи (FB-еrror)
Режим ошибки обратной связи используется для регистрации мелких объектов на неплоской поверхности. В этом случае параметры ОС устанавливаются таким образом, чтобы она успевала отслеживать только большие пологие неоднородности рельефа, а изображение формируется изменением туннельного тока на более крутых неоднородностях поверхности, которые "медленная" ОС не успевает отслеживать. Таким образом, на СТМ изображении видны эти отклонения тока. Такой режим можно рассматривать как аппаратное дифференцирование рельефа поверхности. В последних двух режимах Z координата изображений выражается в единицах силы тока. Описанные три режима используются в зависимости от характера образца и условий эксперимента.
2.2.2 Методики ССМ
Таблица 2
| Методика | Особенности |
| Стандартная | получение изображения рельефа проводящей и непроводящей поверхности. |
| Режим измерения Боковых Сил (РБС) | получение изображения распределения боковых сил и, в частности сил трения на исследуемой поверхности. Измерения в РБС полезны для исследования поверхностного трения, разного из-за неоднородности материала, а также полезны для получения изображений краевых контуров любых поверхностей. |
| Резонансная мола | отличается минимальным повреждением поверхности из всех ССМ методик, потому что при ее использовании уменьшаются боковые силы (силы трения) между образцом и иглой. Таким образом, резонансная мода позволяет исследовать мягкие и желеобразные объекты, которые могут быть разрушены в обычной ССМ моде из-за присутствия боковых сил. При прочих равных условиях работа в резонансной моде позволяет достигать лучшего разрешения микрорельефа поверхности для легко деформируемых объектов. |
2.2.2.1 Контактный режим
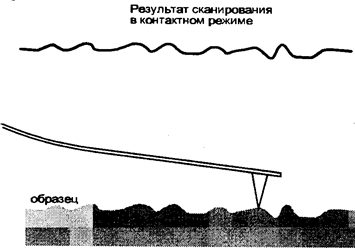 |
Кантилевер непосредственно касается иглой поверхности образца и работает на отталкивание от поверхности (Рис. 4).
Рис.4
В идеальных условиях сила воздействия на образец определяется прогибом и жесткостью кантилевера. Во время сканирования регистрируется отклонение зонда по углу при помощи оптической системы из лазера и четырех секционного зонда (Рис. II).
Контактный режим работы ССМ можно разделить в зависимости от окружающей среды на воздушный и жидкостной варианты. Воздушный удобней и проще в работе, однако в жидкостном можно достигнуть меньших сил взаимодействия кантилевера с образцом и, следовательно, исследовать более мягкие образцы без разрушения. Кроме того, в жидкостном варианте некоторые объекты могут наблюдаться только в естественной для них среде - это клетки и другие биологические объекты, растворы органики и далее будет рассматриваться работа с воздушным вариантом ССМ.
Воздушный контактный ССМ хорошо зарекомендовал себя при исследовании достаточно жестких объектов, таких как кристаллы микросхем, наноструктуры, пленки различных неорганических материалов и многое другое. Вместе с тем с его помощью удается получать достатчно хорошие результаты при исследовании биологических объектов (клеток, вирусов), ЛБ-пленок органических материалов.
Силы, действующее мелису кантилевером и образцом
Здесь будут кратко рассмотрены силы взаимодействия между кантилевером и образцом. При приближении кантилевера к поверхности образца на него начинает действовать сила Ван-дер-Ваальсового притяжения
 |
Рис. 5
Она достаточно дальнодействующая и заметна с расстояния десятков ангстрем. Затем на расстоянии в несколько ангстрем начинает действовать сила отталкивания. Во влажном воздухе на поверхности образца присутствует спой воды. Возникают капиллярные силы, дополнительно прижимающие кантилевер к образцу и увеличивающие минимально достижимую силу взаимодействия. На разных образцах и с разными кантилеверами кривая силы может заметно отличаться, Достаточно часто может возникать электростатическое взаимодействие между зондом и образцом. Это может быть как оталкивание, так и притяжение. В случае отталкивания возможна ситуация, когда подвод кантилевера прекращается до касания с образцом. В этом случае можно увеличить силу прижима при повторном подводе, либо оставить прибор на некоторое время (часы) для статического электричества
Ван-дер-Ваальсово притяжение, капиллярные, электростатические силы, силы отталкивания в области касания иглы с поверхностью образца и силы, действующие на иглу со стороны деформированного кантилевера, в равновесии должны компенсировать друг друга. В месте касания острия иглы с поверхностью возникают заметные деформации как острия иглы, так и образца. Избежать деформаций можно при силах порядка 10-11 Н, но это возможно лишь при работе в жидкости.
2.2.2.2 Топография поверхности (режим постоянной силы)
Измерение рельефа поверхности с поддержанием постоянной силы воздействия иглы кантилевера на поверхность образца является основой для измерения локальной жесткости поверхности, локальной вязкости и локальной силы трения.
Рассмотрим подробнее оптическую схему измерения угла отклонения зонда (Рис,11). Излучение полупроводникового лазера с длиной волны 650-б70нм фокусируется объективом в эллиптическое пятно размером ~50 мкм на отражающей поверхности кантилевера. Отраженный луч попадает на четырехсекционный фотодиод. Вертикальное отклонение регистрируется по разностному сигналу (А+С) - (В+D) (Рис. 6). Боковые силы вызывают крутильную деформацию кантилевера отраженный луч смещается в перпендикулярном направлении. Боковое отклонение регистрируется по разностному сигналу (А+В) - (В+D)
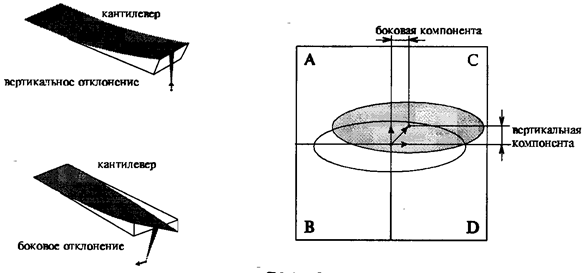
(Рис.6)
Функциональная схема работы АСМ в режиме поддержания постоянной силы может быть описана следующим образом:
Разностный сигнал с регистрирующей системы усиливается и подается на интегратор. При отклонении от заданного значения он воспринимается как сигнал ошибки и интегрируется, что обеспечивает правильную отработку системой постоянного смещения пьезодвижителя. Сигнал с интегратора подается на высоковольтный усилитель, а с него на пьезодвижитель, что компенсирует возникшую ошибку. Обратная связь поддерживает сигнал рассогласования вблизи заданного уровня. Напряжение с интегратора подается на усилитель с регулируемым коэффициентом усиления, поскольку необходимо обеспечить разную чувствительность измерительной части прибора при работе с атомарным разрешением и на образцах с грубым рельефом. Затем сигнал подается на аналого-цифровой преобразователь, а оттуда через интерфейсную плату записывается в память компьютера и интерпретируется как рельеф образца. Сила прижима кантилевера к образцу выставляется при начальной юстировке фотодиода. Дополнительный блок установки смещения обеспечивает возможность изменения силы прижима в подведенном положении. При этом обратная связь обеспечивает поддержание разностного сигнала. Дистанционная регулировка силы увеличивает удобство работы с прибором. (При отклонении разностного сигнала от нуля начинают проявляться шумы интенсивности лазера. Поэтому нужно осторожно применять электронную регулировку силы на образцах с малым рельефом, например, при достижении атомарного разрешения
Точность работы применяемой здесь интегральной обратной связи зависит от петлевого коэффициента усиления. Достижение максимальных скоростей сканирования требует быстрой работы обратной связи. Для увеличения скорости отработки обратной связью сигнала ошибки выгодно ставить максимальный коэффициент петлевого усиления. Но при слишком большом коэффициенте усиления может быть достигнут порог генерации. Работа вблизи порога генерации характеризуется большими переколебаниями и поэтому точность падает. С друюи стороны при слишком малых коэффициентах усиления обратная связь не успевает отслеживать резкие изменения рельефа, что также снижает точность измерений. Поэтому существует оптимальный коэффициент усиления для каждой системы зонд-образец, который обеспечивает максимальную точность работы обратной связи и достоверность данных.
На петлевой коэффициент усиления влияет несколько причин. В зависимости от применяемого кантилевера при прочих равных параметрах он может изменяться в несколько раз. Коэффициент усиления изменяется обратно пропорционально длине кантилевера, и следовательно, чем кантилевер короче, тем выше коэффициент передачи. Кроме того, коэффициент усиления может заметно изменяться в зависимости от юстировки кантилевера. Оператор может контролировать петлевой коэффициент усиления регулировкой усилителя с изменяемым коэффициентом усиления в интеграторе.
При больших значениях петлевого усиления генерация возникает на частотах первого резонанса пьезосканера. Для сканера с полем 11х11 мкм2- примерно 10 кГц, с полем 25Х25 мкм2 около 7,5 кГц. Частота генерации зависит от массы образца. Для устранения генерации достаточно уменьшить коэффициент усиления регулируемого усилителя. При этом амплитуда автоколебаний будет уменьшаться без изменения частоты.
При наличии большого трения между образцом и иглой также может возникать другой вид генерации.
Для него характерно, что при уменьшении коэффициента усиления в петле обратной связи, частота уменьшается без изменения амплитуды, причем может достигать долей герца, но тем не менее генерация всегда присутствует. Избежать этого вида генерации можно уменьшением силы трения за счет уменьшения силы взаимодействия или использованием коротких кантилеверов. При сканировании амплитуда генерации значительно падает, поэтому во многих случаях ее присутствие практически не сказывается на качестве изображения.
На полученном в результате сканирования изображении могут присутствовать сбои, имеющие вид отдельных линий в направлении сканирования, отличающихся по высоте от общего рельефа. Они вызваны тем, что игла цепляется за неровности рельефа и затем проскальзывают по образцу или тем. что игла частично разрушает образец. Избежать таких сбоев можно подбором направления сканирования, уменьшением силы прижима, уменьшением скорости сканирования. Выбор направления сканирования в различных режимах связан с тем, что кантилевер по-разному ваимодействует с возникающими изменениями рельефа. При сканировании в положительном направлении (+Y) можно считать, что кантилевер движется снизу вверх относительно изображения поверхности на мониторе (на самом деле сканирование осуществляется образцом, который движется в обратном направлении). При этом он наезжает на препятствия пологим склоном иглы и при этом преодолевает их. При таком варианте сканирования сбои - срывы кантилевера возникают реже. Если же он наезжает на препятствия стороной под углом 75, то он значительно чаще цепляется за неровности и чаще возникают сбои на изображении. Вообще, в зависимости от образца необходимо подбирать направление сканирования. В части случаев оказывается выгодным сканировать на +Х или -X, например, при снятии изображения боковых сил. На изображении могут возникать характерные следы связанные с особенностями рельефа в направлении быстрого сканирования, обусловленные конечной скоростью работы обратной связи. Их величина зависит от скорости сканирования, петлевого коэффициента усиления, характера рельефа. Если во время сканирования регистрировать сигнал ошибки обратной связи, то эти отклонения будут хорошо видны. Получившееся изображение содержит практически всю потерянную при снятии топографии информацию. Используя результаты сканирования в режиме топо-графии и в режиме регистрации ошибки обратной связи, можно точнее восстанавливать топографию поверхности.
2.2.2.3 Режим снятия изображения сил.
Работа АСМ с использованием обратной связи приводит к увеличению уровня шумов, частичной потере информации о топографии поверхности или ограничению скорости сканирования. В некоторых случаях оказывается полезным использование режима сканирования при котором обратная связь отключается, положение пьезосканера по Z фиксируется, а регистрируемым сигналом становится непосредственно сигнал расcогласования в фотодиоде. Это режим постоянной высоты (Z=соnst). В этом случае сила прижатия кантилевера к поверхности изменяется в процессе сканирования, Однако, если образец достаточно жесткий, получаемое изображение хорошо отражает топографию поверхности. Используя результаты снятия зависимости прогиба кантилевера от расстояния между зондом и образцом, можно пересчитать регистрируемый ток в линейные размеры. Однако нужно помнить, что при больших отклонениях от нулевого положения зависимость разностного сигнала рассогласования от перемещения зонда становится нелинейной. Примерный диапазон линейности зависит от кантилевера: чем короче кантилевер, тем меньше диапазон. Динамика отслеживания поверхности в этом режиме ограничена частотными свойствами кантилевера, а не обратной связи. Резонансные частоты кантилеверов значительно выше характерной частоты обратной связи, которая составляет единицы килогерц. Это дает возможность сканировать с более высокими скороcтями
1.2.2.4 Режим регистрации ошибки обратной связи.
Ошибка обратной связи, возникающая при сканировании в режиме топографии, содержит дополнительную информацию о топографии. Она может быть использована для более точного восстановления рельефа.
Однако этот режим можно рассматривать как промежуточный между режимом постоянной силы и постоянной высоты, если отрегулировать скорость отработки обратной связи так, чтобы она отслеживала пологие изменения рельефа и не успевала отслеживать крутые. Тогда во время пересечения зондом небольших неоднородностей сканирование будет происходить при почти постоянной длине пьезосканера. В результате на изображении будут слабо проявляться медленные изменения рельефа и с высоким контрастом - резкие. Это может быть полезно для отыскания мелких неоднородностей на большом поле на фоне крупных пологих особенностей рельефа.
1.2.2.5 Измерение боковых сил
Во время сканирования по +Х или -X возникает дополнительная крутильная деформация кантилевера. Она обусловлена моментом сил, действующих на острие иглы. Угол кручения при небольших отклонениях пропорционален боковой силе. Измерительная система микроскопа позволяет регистрировать кручение кантилевера. Луч лазера, отраженный от кантилевера, получает в этом случае дополнительное смещение в боковом направлении (Рис.6). В этом случае регистрируется сигнал (А+В) - (С+D). Для измерения боковых сил АСМ работает в режиме поддержания постоянной силы, т.е. как при снятии топографии.
При движении по плоской поверхности, на которой присутствуют участки с разным коэффициан-том трения, угол кручения будет изменяться от участка к участку (Рис.7).
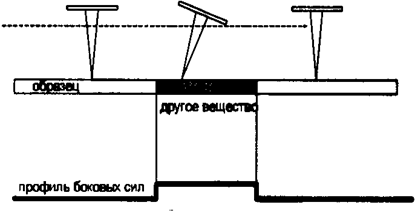 |
Рис.7
Это позволяет говорить об измерении локальной силы трения. Если присутствует рельеф, то такая интерпретация невозможна (Рис, 8).
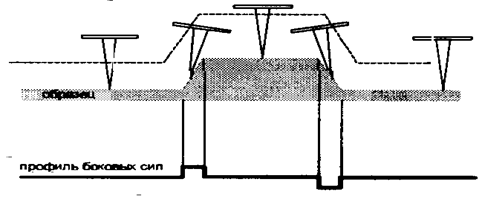 |
Рис.8
Тем не менее, этот вид измерений позволяет получать изображения, на которых хорошо видны мелкие особенности рельефа, и облегчать их поиск. В режиме измерения боковых сил легко получать атомарное разрешениена слюде и некоторых других слоистых материалах.
Следует отметить, что при измерении топографии с атомарным разрешением получается атомарный рельеф до нескольких ангстрем, тогда как реальный рельеф составляет доли ангстрема. Такая большая величина рельефа объясняется влиянием крутильной деформации кантилевера из-за неидеальности регистрирующей системы - кручения кантилевера воспринимается как его продольный изгиб. Это возникает например даже при очень небольшом угле поворота фотодиода относительно направления движения луча при продольном изгибе кантилевера.
2.2.3 Вибрационные и модуляционные методы измерений
На базе различных принципов зондовой микроскопии были разработаны многочисленные методы получения информации о свойствах поверхности, использующие вибрацию зонда или образца или модуляцию параметра.
Использование вибрации или модуляции на достаточно высокой частоте позволяет, с одной стороны, регистрировать дифференциальные характеристики, поддерживая постоянные средние значения величин, а с другой стороны - значительно уменьшать величины шумов с частотной зависимостью 1/f(где f - частота) за счет переноса спектра сигнала из области вблизи 0 Гц в область высоких частот.
В числе общих преимуществ отдельных вибрационных методов можно назвать, во-первых, использование резонансных свойств системы, что позволяет существенно повысить чувствительность по сравнению со статическим измерением, а во-вторых, уменьшение сил взаимодействия, в частности, боковых, между зондом и поверхностью в бесконтактном (полуконтактном) режимах. В СТМ-режиме вибрация образца или иглы позволяет модулировать туннельный зазор и, детектируя изменения туннельного тока, получать сигнал dI/dz, дающий информацию о локальной высоте потенциального барьера для электронов (локальной работе выхода). Модуляция туннельного напряжения u в СТМ - режиме позволяет регистрировать сигнал dI/dz, определяемый локальной спектральной плотностью состояний.
В АСМ режиме вибрация образца и регистрация амплитуды отклика кантилевера дает информацию о локальной жесткости образца. Детектирование амплитуды и/или фазы колебаний кантилевера, возбуждаемого ньезоэлементом, позволяет сканировать в бесконтактном и полуконтактном режиме рельеф поверхности даже таких образцов, которые нельзя исследовать в контактном режиме ввиду того, что они легко деформируются или разрушаются иглой кантилевера. Эти режимы позволяют также использовать кантилеверы с тонкими и очень острыми иглами, которые в контактном режиме сами легко разрушаются.
1.2.3.1 СТМ-методы
Режим измерения локальной высоты барьера
В режиме измерения локальной высоты потенциального барьера для туннелирующих элекронов, которую можно с некоторой натяжкой называть локальной работой выхода, сигнал модуляции прикладывается к 2-обкладкам пьезотрубки. Обратная связь в процессе сканирования поддерживает низкочастотную составляющую туннельного тока постоянной. При этом регистрируется амплитуда высокочастотных колебаний туннельного тока, модуляцией туннельного промежутка из-за вызванных вибраций пьезотрубки.
В приближении простейшей одномерной модели туннелирования электрона через прямоугольный потенциальный барьер высотой Fi, зависимость туннельного тока I от ширины барьера z выражается экспоненциальным множителем
Дифференцированием этого
множителя получаем;
и,следовательно
т.е. производная туннельного тока по ширине туннельного зазора, нормированная на сам туннельный ток, дает информацию о локальной высоте потенциального барьера. Так как среднее значение туннельного тока в процессе сканирования поддерживается постоянным, и амплитуда вибрации пьезотрубки не меняется, то полученная в результате сканирования картина распределения амплитуды колебаний туннельного тока как раз и содержит информацию о распределении величины Fi , и, следовательно, о химических свойствах поверхности. Реальная ситуация не столь проста, и амплитуда колебаний туннельного тока зависит еще от геометрии поверхности, от состава адсорбатов которые искажают форму потенциального барьера и кроме того, при измерениях на воздухе из-за наличия адсорбатов между иглой и поверхностью всегда существует заметная сила отталкивания, т.к. игла должна "продавить" слой адсорбата, прежде чем возникает заметный туннельный ток.
Это приводит к зависимости результатов измерений от локальной жесткости образца Так, в местах, где жесткость образца ниже, вибрация приводит в большей степени к деформации самого образца, а не к деформации адсорбата и изменению туннельного зазора. Амплитуда модуляции туннельного тока уменьшается, создавая впечатление относительно пониженной работы выхода.Этот эффект следует учитывать при интерпретации результатов.
Режим спектроскопии
В режиме спектроскопии модулируется туннельное напряжение и между образцом и иглой, и регистрируется амплитуда отклика туннельного тока на эту модуляцию. При этом постоянная составляющая туннельного напряжения остается неизменной, и обратная связь поддерживает постоянное среднее значение туннельного тока. Таким образом, результат измерения представляет собой производную dI/dU в заданной точке вольт-амперной характеристики. Поскольку форма вольт-амперной характеристики опрелеляется в первую очередь энергетическим спектром объемных и поверхностных электронных состояний иглы и образца, этот режим и получил название режима спектроскопии.
В режиме спектроскопии, как и в режиме измерения локальной высоты барьера, важно, чтобы обратная связь успевала с высокий точностью поддерживать постоянным среднее значение I (если усилитель работает не в логарифмическом режиме), поскольку на многих образцж изменение среднего значения I из-за неровностей рельефа может привести к гораздо большим отклонениям амплитуды колебаний туннельного тока, чем изменение свойств поверхности.
2.2.3.2 АСМ-методы
К числу вибрационных методов АСМ относятся бесконтактный, полуконтактный режим и режим локальной жесткости.
Бесконтактным режим
Бесконтактный режим обеспечивает измерение Ван-дер-Ваальсовых электронных, магнитных сил вблизи поверхности, причем сила взаимодействия может быть очень малой (порядка 10-12Н), что позволяет исследовать очень чувствительные или слабо связанные с поверхностью объекты, не разрушая, и не сдвигая их.
Вкладыш - держатель кантилевера (Рис.9) содержит пьезокерамическую пластинку, вибрации которой передаются кантилеверу и возбуждают его колебания на требуемой частоте, которая во всех разновидностях этого метода выбирается в пределах одного из резонансных пиков на амплитудно-частотной характеристике (АЧХ).
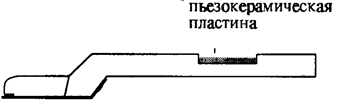
Рис. 9
Возбуждающий сигнал формируется цифровым синтезатором, содержащим высокостабильный кварцевый генератор, что позволяет поддерживать частоту сигнала с относительной точностью не хуже 10-5-10-6. Переменная составляющая сигнала с четырехсекционного фотодиода, обусловленная колебаниями кантилевера, усиливается и попадает на вход синхронного детектора, который можно формировать:
- сигнал, пропорциональный амплитуде основной частоты или одной из гармоник.
- сигнал сдвига фазы (колебаний кантилевера относительно возбуждающего сигнала.
- либо сигнал произведения амплитуды на зт или соб сдвига фазы. Любой из перечисленных сигналов может быть включен в петлю обратной связи.
Вблизи поверхности образца вибрирующий с малой амплитудой кантилевер попадает в неоднородное силовое поле. Наличие градиента силы приводит к частотному сдвигу резонансного пика. Поэтому в случае возбуждения сигналом фиксированной частоты амплитуда и фаза колебаний кантилевера в неоднородном поле меняется.
Если обратная связь в процессе сканирования меняет положение зонда по нормали к образцу поддерживая амплитуду, либо фазу колебаний кантилевера постоянной (режим топографии),то результатом записи сигнала на выходе ОС в процессе сканирования является поверхность постоянного градиента силы.
Можно регистрировать изменения амплитуды либо фазы колебаний в процессе сканирования, не меняя расстояние между зондом и основанием образца (режим постоянной высоты). Возможен также режим, предусматривающий предварительное сканирование, топографии в контактном или полуконтактном режиме, после чего производится повторное сканирование по тому же участку с поддержанием заданного удаления зонда от поверхности в каждой точке сканирования с регистрацией амплитуды либо фазы. Этот режим позволяет отделить информацию о магнитных и электрических свойствах поверхности от топографических данных , т.к. Вандер-Ваальсово притяжение кантилевера и поверхности остается практически неизменным при повторном сканировании, поскольку расстояние между зондом и поверхностью не меняется, и, значит изменение амплитуды и фазы колебаний вызываются другими дальнодействующими силами - электрическими либо магнитными.
Минимально возможное расстояние между иглой кантилевера и поверхностью образца в бесконтактном режиме определяется, с одной стороны, свойствами иглы кантилевера и поверхности, а с другой стороны - жесткостью балки кантилевера. Если по мере приближения зонда к поверхности по достижении некоторого расстояния между ними окажется, что градиент силы притяжения иглы к образцу превысил жесткость балки кантилевера, то кантилевер "прилипнет" к поверхности. Поэтому минимальная рабочая дистанция должна превышать это критическое расстояние. Наиболее значительной причиной притяжения являются, как правило, капиллярные эффекты, которые, к тому же, обладают большим собственным гистерезисом Но и в отсутствие капиллярных явлений, например, в случае несмачиваемых поверхностей, эффект "залипания" может наблюдаться из-за электростатических, магнитных и даже Ван-дер-Ваальсовых сил притяжения. Поэтому чем вы те жесткость кантилевера тем меньше может быть рабочее расстояние, и тем большего разрешения можно достичь (при удалениях, соизмеримых, или превы-шающих радиус кривизны кантилевера), хотя при этом возрастает и сила взаимодействия. Возможна также ситуация, когда градиент сил притяжения не превосходит жесткости кантилевера вплоть до касания иглы и поверхности, т.е. вплоть до сближения крайних атомов зонда и образца в область отталкивающего потенциала, и, значит, рабочее расстояние может быть сколь угодно малым. Такая ситуация является переходной между бесконтактным и полуконтактным режимом.
Полуконтактный режим
Характерной особенностью полуконтактного режима является то, что большую часть периода колебаний кантилевер не касается поверхности и вообще относительно слабо взаимодействует с образцом. И только при сближении иглы с поверхностью вплоть до попадания в область отталкивающего потенциала взаимодействие резко усиливается, и при этом соударении кантилевер теряет избыток энергии, накопленный за остальную часть периода. В зависимости от характера взаимодействия может меняться сдвиг фазы основной гармоники колебаний относительно возбуждающего сигнала и амплитуда и фаза высших гармоник. Базовым же эффектом является ограничение амплитуды колебаний на уровне, примерно равном расстоянию между вершиной иглы в свободном состоянии кантилевера и поверхностью образца. Т.е., грубо говоря, кантилевер может растачиваться только до касания поверхности образца и не дальше.В полуконтактном режиме, в отличие от бесконтактного, жесткость кантилевера может быть меньше, чем максимальный градиент сил притяжения вблизи поверхности. Избавиться же от "залипания" иглы можно путем увеличения амплитуды колебаний кантилевера до такого значения при котором сила со стороны балки кантилевера, отрывающая иглу от поверхности, превышает притяжение иглы к поверхности. В бесконтактном режиме это невозможно, поскольку там амплитуда должна быть мала по сравнению с расстояниями, на которых заметно меняется градиент сил.
Режим измерения жесткости.
В режиме измерения локальной жесткости сигнал модуляции подается на 2-обкладки пьезотрубки. При этом игла кантилевера касается поверхности, и вибрация образца передается кантилеверу. Измеряемой величиной является амплитуда колебаний балки кантилевера. Коэффициент передачи колебаний образца в колебания балки кантилевера пропорционален отношению жесткости системы игла- поверхность в данной точке к жесткости балки. В одном предельном случае абсолютно гибкого кантилевера с жесткой иглой на жестком образце, колебания пьезотрубки полностью передаются балке. В другом предельном случае очень жесткого кантилеверана гибком или легко деформируемом образце и/или при мягкой игле колебания трубки приводят лишь к деформации поверхности и иглы, тогда как балка остается неподвижной. Следует помнить, что жесткость системы игла-образец зависит не только от модулей Юнга соприкасающихся поверхностей, но и от их геометрии, в частности, от радиусов кривизны. Наибольшая жесткость в области контакта достигается в случае поверхностей равных по величине кривизны, но противоположного знака, т.е., в случаев контакта круглого острия иглы с круглой впадиной того же радиуса.
Поэтому режим измерения локальной жесткости будет контрастировать ступеньки на образце, показывать небольшие бугорки как области с пониженной жесткостью, даже если они состоят из того же материала, что и весь образец.
2.2.4 Схема взаимодействия компонентов СЗМ
На (Рис.10) схематично изображены составляющие компоненты присущие СЗМ;
- исследуемый образец,
- игла ССМ,
- кантилевер ССМ,
- система регистрации отклонения кантилевера,
- сканер, чье перемещение в плоскости задает сканирование, а вертикальное перемещение по оси Z управляется обратной связью,
- движитель с системой грубого подвода, обеспечивающий подведение образца к зонду в зону рабочего диапазона сканера,
- процессор,
- блок питания,
- рабочая станция.
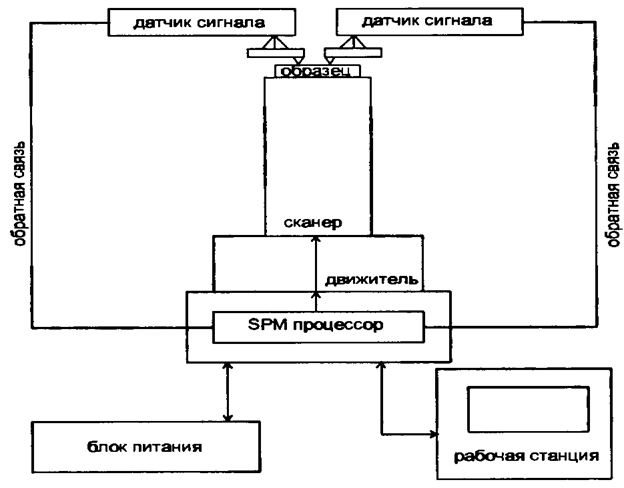
Рис. 10
2.2.5 Схема регистрации отклонения кантилевера
В ССМ корпорации МДТ использована оптическая схема регистрации отклонений кантилевера (Рис.11), которая, являясь относительно несложной, позволяет регистрировать суб-ангстремные отклонения кантилевера. Источником является полупроводниковый лазер Lyambda=670 нм, Р = 0,9 мВт, луч которого фокусируется на зеркальной поверхности кантилевера в районе острия. Отраженный от кантилевера свет попадает на четырехсекционный фотодиод, усиленный разностный сигнал от которого позволяет определять угловое отклонение кантиклевера с точностью менее 0.1нм, что обеспечивает разрешение по вертикали 0.1нм.