Реферат: Разработка технологического процесса изготовления детали с использованием станков с ЧПУ
Государственный комитет по науке и высшей школе РФ
Вологодский политехнический институт
Кафедра: ТМС
Дисциплина: ТМС и ТОА
КУРСОВОЙ ПРОЕКТ
Разработка технологического процесса изготовления детали с использованием станков с ЧПУ
и средств автоматизации
Выполнил:
Принял: преподаватель
Яняк С.В.
г. Вологда
1996 г.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ..........................................................................................................
1. Описание конструкции и назначения детали..................................................
2. Технологический контроль чертежа детали...................................................
3. Анализ технологичности конструкции детали...............................................
4. Выбор способа изготовления заготовки.........................................................
5. Выбор плана обработки детали......................................................................
6. Выбор типа производства и формы организации
технологического процесса...........................................................................
7. Выбор и расчет припусков на обработку....................................................
8. Выбор оборудования....................................................................................
9. Выбор режущих инструментов.....................................................................
10. Выбор приспособлений...............................................................................
10.1. Станочные приспособления.................................................................
10.2 Выбор инструментальных приспособлений.........................................
11. Выбор средств измерений и контроля размеров.......................................
12. Выбор режимов резания.............................................................................
13. Техническое нормирование времени операций.........................................
14. Выбор средств транспортировки заготовок..............................................
15. Программирование станка с ЧПУ..............................................................
16. Технико-экономическое обоснование разработанного
технологического процесса.........................................................................
17. Исследовательская часть проекта..............................................................
17.1. Ультразвуковые колебания..................................................................
17.2. Кинематика ультразвуковой обработки..............................................
17.3. Методы и технологические характеристики ультразвуковой
размерной обработки материалов.......................................................
17.4. Станки и инструмент для обработки ультразвуком...........................
18. Промышленный робот для обслуживания токарного станка с ЧПУ........
ЗАКЛЮЧЕНИЕ.................................................................................................
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ...........................................
ПРИЛОЖЕНИЯ.................................................................................................
ВВЕДЕНИЕ
Тема проекта представляется вполне актуальной. Это подтверждается тем, что проектирование технологии позволяет на практическом уровне, а следовательно и более глубоко изучить методы машиностроения, познакомиться со станками, инструментом, приспособлениями. Поскольку задание к курсовому проекту включает применение и программирование станка с ЧПУ и использования средства автоматизации, это расширяет сферу познавательности при проектировании до объема, включаемого в курс подготовки инженеров по автоматизации.
Так как хвостовик является распространенной и типичной деталью, для изготовления которой применяются практически все основные виды обработки металла резанием, это так же положительно влияет на учебную функцию курсового проекта.
Данный вид хвостовика используется в производстве подшипников в качестве рабочего приспособления штампа для закрепления инструмента, деталей, для присоединения к нему других элементов или механизмов.
Подшипник является распространенной и достаточно ответственной деталью машин, механизмов, приборов и других устройств. Высокие требования к изготовлению подшипников по точности, по прочности и по эксплуатационным характеристикам обеспечиваются использованием качественной технологической оснастки и инструмента. Поэтому проектирование и изготовление деталей типа хвостовик и других приспособлений требует серьезной комплексной проработки на всех стадиях процесса производства.
ВОЛОГОДСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ЗАДАНИЕ
на курсовой проект по дисциплине ТМС и ТОА
(технология машиностроения и технологические основы автоматизации)
Тема проекта:
Разработка технологического процесса изготовления детали с использованием станков с ЧПУ и средств автоматизации
Наименование и номер чертежа детали: Хвостовик 116-07, оп, 2а
Станок с ЧПУ: Токарный
Средство автоматизации: Робот для обслуживания токарных станков с ЧПУ
Технологическое исследование: « Технологические возможности обработки
металлов ультразвуком »
Руководитель проекта: доцент кафедры ТМС, к.т.н. Яняк С.В.
Исполнитель: студент группы ЭМ-41 Толчельников Е.В.
Задание выдано: 16.05.96.
1. Описание конструкции и назначения детали
Деталь, представленная для курсового проектирования — хвостовик, применяющийся для крепления штампа. Назначение детали позволяет судить о её эксплуатационных условиях: вероятно это высокие ударные нагрузки, а также условия параллельности плоскостей крепления и крепежных отверстий, обеспечивающих заданный уровень качества штампуемых заготовок.
Хвостовик является телом вращения, имеющим центральное отверстие, дополнительные отверстия параллельно оси, канавку, две закрытых цилиндрических поверхности, гнездо треугольной формы.
Наиболее сложными и точными являются следующие поверхности: закрытая цилиндрическая поверхность меньшего диаметра и перпендикулярная ей плоскость основания, качество изготовления которых будет влиять на точность установки штампа. Так же важным критерием является параллельность плоскости с треугольным гнездом относительно плоскости крепления.
2. Технологический контроль чертежа деталиЧертеж детали содержит две проекции с местными разрезами, изображающими дополнительные отверстия. Верхняя проекция показана не рационально, т.к. треугольное гнездо, являющееся наиболее сложным элементом на чертеже показано невидимой линией.
Размеры на чертеже указаны все, но не на всех указаны предельные отклонения, поэтому на эти размеры примем 14 квалитет точности. Размеры отверстий и валов указаны не по стандартам ISO, т.е. без обозначения посадок.
Технические условия по неуказанным отклонениям не оговорены, не оговорены также требования к термической обработке, которая необходима, так как хвостовик должен эксплуатироваться в условиях сильных ударных воздействий.
Канавку в таком виде, как она показана на чертеже, обрабатывать сложно, поэтому изменим ее форму, и покажем ее в укрупненном виде.
На некоторых гранях детали необходимы фаски, которые также не указаны на чертеже.
Переработанный чертеж детали приведен на рис.2.1.
3. Анализ технологичности конструкции деталиФорма детали не позволяет использовать удобную, близкую по форме заготовку. В техническом задании отсутствует информация о путях упрощения конструкции. Желательно при изготовлении детали использовать упрочняющую термообработку до 25-30 единиц HRC.
Труднодоступными элементами конструкции являются, как указано выше, канавка и две закрытые цилиндрические поверхности, для которых необходимо использование специального инструмента. Открытые поверхности и отверстия возможно обработать стандартными инструментами.
Все операции по обработке детали могут выполняться на стандартном оборудовании. Для сверлильной операции требуются специальные приспособления типа УСП.
4. Выбор способа изготовления заготовкиДля изготовления заготовки возможно применение нескольких методов, для выбора оптимального рассмотрим два метода изготовления заготовки и выберем метод с минимальными затратами на изготовление заготовки и дальнейшей обработки.
— Литье в металлические формы
— Ковка в подкладном штампе
Себестоимость детали можно рассчитать следующим способом:
C = A+B = a×m×k1×k2×k3 + b×m2/3×k4×k5×k6×k7×k8 ,
где
A - себестоимость изготовления заготовки
B - себестоимость механической обработки
a - себестоимость изготовления заготовки средней сложности
массой 1кг. ( a = 0.373 руб./кг )
m - масса заготовки
k1 - коэффициент сложности формы ( 1 для средней сложности )
k2 - стоимость материала ( 1.5 для углеродистой стали )
k3 - точность изготовления заготовки
Себестоимость механической обработки у обоих способов изготовления заготовки одинакова, поскольку получаемые заготовки незначительно отличаются. Себестоимость изготовления заготовки ковкой много меньше, чем литьем, поскольку коэффициент a для литья 1.985 руб./кг, что более чем в пять раз превосходит стоимость ковки. В том случае если заготовку при литье выполнить не в форме усеченного конуса а приблизить к контуру детали, что сократит объем заготовки примерно в два раза стоимость изготовления все равно перекроет эту экономию.
Для изготовления заготовки хвостовика целесообразно использовать ковку в подкладном штампе. Чертеж заготовки представлен на рис.4.1.
При этом способе изготовления заготовки возможно получить припуски до 3 мм, с допусками +1.5 ¸ -1 мм.
5. Выбор плана обработки деталиТехнологический процесс обработки детали предусматривает несколько стадий. Если рассматривать данный процесс в укрупненном плане, то необходимо выделить черновую обработку и окончательную (абразивными инструментами). Каждая из этих стадий разбивается на необходимое количество технологических операций.
В описании технологического процесса не указываются такие операции как смазка, упаковка, нанесение специальных покрытий и т.д.
Можно предложить следующий порядок операций:
1. Черновые и чистовые токарные операции.
2. Сверлильная операция.
3. Фрезерная операция.
4. Слесарная.
5. Термообработка.
6. Плоское шлифование.
7. Координатно-расточная операция.
К окончательным технологическим операциям следует отнести упаковочную операцию и др.
В соответствии с порядком операций можно предложить следующий технологический маршрут обработки.
План обработки детали
Таблица 5.1.
| № | Наименование операции или перехода | Норма времени |
| 1 | Токарная | 8.2 |
| 1.1 | Подрезать торец Æ60 предварительно | 0.5 |
| 1.2 | Точить цилиндрическую ступень Æ85 предварительно | 2 |
| 1.3 | Точить цилиндрическую ступень Æ50 предварительно | 2 |
| 1.4 | Точить цилиндрические поверхности Æ120 и Æ60 предварительно | 0.5 |
| 1.5 | Центровать отверстие Æ13 | 0.5 |
| 1.6 | Сверлить отверстие Æ13 | 1 |
| 2 | Токарная | 7.1 |
| 2.1 | Подрезка торца Æ175 мм предварительно | 0.5 |
| 2.2 | Проточить диаметр Æ175 предварительно | 0.5 |
| 2.3 | Подрезать торец Æ175 окончательно | 0.5 |
| 2.4 | Проточить диаметр Æ175 окончательно | 0.5 |
| 2.5 | Центровать отверстие Æ62 | 0.5 |
| № | Наименование операции или перехода | Норма времени |
| 2.6 | Сверлить отверстие Æ62 | 2 |
| 2.7 | Расточить отверстие Æ62 | 1 |
| 2.8 | Снять фаску с Æ175мм | 0.1 |
| 3 | Токарная | 5.5 |
| 3.1 | Подрезать торец Æ60 окончательно | 0.5 |
| 3.2 | Точить глухую ступень Æ50 окончательно | 1 |
| 3.3 | Точить глухую ступень Æ85 окончательно | 1 |
| 3.4 | Точить канавку | 0.5 |
| 3.5 | Точить диаметр Æ60 окончательно | 0.5 |
| 3.6 | Точить диаметр Æ120 окончательно | 0.5 |
| 3.7 | Снять фаски | 0.2 |
| 4 | Сверлильная | 11.6 |
| 4.1 | Сверлить 4 отв. Æ13 | 4 |
| 4.2 | Сверлить 2 отв. Æ9 | 2 |
| 4.3 | Зенкеровать отв. Æ10 | 0.5 |
| 4.4 | Сверлить 3 отв. в углах траверсы | 3 |
| 5 | Фрезерная | 4.1 |
| 5.1 | Фрезеровать треугольное гнездо предварительно | 2 |
| 5.2 | Фрезеровать треугольное гнездо окончательно | 1 |
| 6 | Слесарная | |
| 6.1 | Зенкеровать 2 отв. Æ10 | 0.1 |
| 6.2 | Тупить острые кромки | 0.5 |
| 6.3 | Маркировка | 0.1 |
| 7 | Термообработка | 30 |
| 8 | Шлифовальная | 8.7 |
| 8.1 | Шлифовать крепежную часть | 5 |
| 8.2 | Шлифовать торец | 2 |
| 9 | Координатно-расточная | 12.2 |
| 9.1 | Расточить точные отверстия Æ10 | 10 |
| Итого: 78 мин |
Нормы времени в таблице приведены округленно. Для каждого перехода приведено только основное время операции и вспомогательное. Для каждой операции приведено полное время, т.е. время с учетом подготовительно-заключительных и контрольных операций, а также регламентированных перерывов. Методика расчета времени операций приведена в п.13.
6. Выбор типа производства и формы организации технологического процесса
Согласно ГОСТ 3.1108-74 для выбора типа производства необходимо рассчитать коэффициент закрепления операций, который равен отношению количества операций за последний месяц к количеству явочных мест
Кзо = ![]()
Но выбор типа производства по этой методике не представляется возможным в виду отсутствия информации о номенклатуре производства.
Для единичных технологических проектов может быть использован другой метод — расчет коэффициента загрузки оборудования ( рассчитывается время необходимое для загрузки ).
Коб =  ,
,
где
tшт.ср — средняя норма времени на операции ( 8.2 мин );
N — годовая программа выпуска ( 1000 шт. );
Fq — годовой действительный фонд времени ( 4000 часов );
n — коэффициент загрузки каждого рабочего места ( 0.75 ).
В результате расчета Коб = 0.046, т.е. полученное значение соответствует мелкосерийному производству.
В промышленности используются две основные формы организации производства: поточная и групповая.
Первая используется в крупносерийном и массовом производстве. В нашем случае целесообразно применить групповую форму организации.
Группирование станочного оборудования и рабочих мест производится либо по видам технологической обработки изделий, либо по виду технологических процессов. При втором способе группировки специализированные участки создаются по конструкторско-технологическому признаку.
В нашем случае воспользуемся группированием станочного оборудования по видам обработки. Он заключается в формировании участков станков одного наименования.
В результате группировки получается шесть участков: токарных, сверлильных, фрезерных, координатно-расточных, шлифовальных станков и участок термообработки.
7. Выбор и расчет припусков на обработку
Расчет припусков на обработку производится на основе аналитического метода. Учитывая форму заготовки и требования к качеству поверхности для расчета припуска выберем поверхность торца детали Æ175 мм.
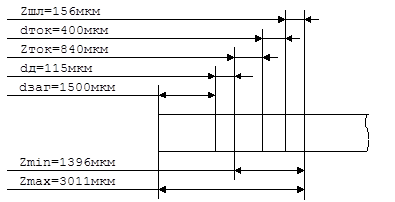
Рис 7.1. Схема расположения припусков.
Величины припусков Zшл и Zток рассчитываются, остальные выбираются.
Zi = Rz,i-1 + Ti-1 + ri-1 + ei , где
Rz,i-1 — высота неровностей поверхности, оставшейся после выполнения предшествующего перехода.
Ti-1 — глубина дефектного слоя.
ri-1 — пространственные отклонения.
ei — погрешности базирования и закрепления.
После токарной операции Rz=40, T=Rz .
Тогда для шлифования:
r = 0.2 мкм/мм ×180 мм = 0.2×180 = 36 мкм.
e = 40 мкм.
Zшл = 40 + 40 + 36 + 40 = 156 мкм.
Для горячекованных или штампованных заготовок:
Rz + T = 600 мкм.
r = 120 мкм, e = 120 мкм,
тогда Zток = 600 + 120 + 120 = 840мкм,
допуск на деталь по 9 квалитету dд = 115 мкм,
на заготовку для ковки в подкладном штампе dзаг = 1500 мкм,
на токарную операцию по 12 квалитету dток = 400 мкм.
В результате суммарный минимальный припуск равен:
Zmin = Zшл + dток + Zток = 156 + 400 + 840 = 1396 мкм,
максимальный припуск:
Zmax = Zmin + dд + dзаг = 1396 + 115 + 1500 = 3011мкм.
Общий номинальный припуск выберем
Zном = 3мм,
что соответствует параметрам заготовок полученных ковкой в подкладном штампе.
8. Выбор оборудованияВыбор металлорежущих станков для изготовления предложенной детали осуществлен на основании методики, изложенной в [1] с учетом следующих факторов:
- вид обработки;
- точность обрабатываемой поверхности;
- расположение обрабатываемой поверхности относительно технологических баз;
- габаритные размеры и масса заготовки;
- производительность операции;
- тип производства.
Таблица 8.1
| Операция | Наименование операции | Станок |
Основные технические характеристики |
| 1 | 2 | 3 | 4 |
| 1,2,3 |
Токарная операция |
Токарный станок с ЧПУ 16К20Ф3С5 |
1. Макс. Диаметр обрабатыв. дет....400 2. Набольшая длина продольного перемещения ......................900 3. Наибольшая длина поперечного перемещения.......................250 |
| 4. Диапазон скоростей вращения | |||
| шпинделя об/мин........12.5-2000 | |||
| 5. Наибольшая скорость продольной | |||
| подачи мм/мин.. .............1200 | |||
| 6. Диапазон скоростей подач мм/мин | |||
| - продольная подача.....3-1200 | |||
| - поперечная.. .........1.5-600 | |||
| 7. Дискретность перемещения, мм | |||
| - продольная подача.....0.01 | |||
| - поперечная.. .........0.005 | |||
| 8. Мощность электродвигателя | |||
| главного движения, кВт......10 | |||
| 9. Масса станка, кг.........4000 |
Таблица 8.1. ( продолж.)
| 1 | 2 | 3 | 4 |
| 4 | Сверлильная операция | Сверлильный станок с ЧПУ 2Р135Ф2 |
1. Макс. диаметр сверления, мм ..... 35 2. Макс. расстояние от торца шпинделя до стола, мм ........ 600 3. Макс. ход стола, мм: - продольный(Х) ....560 |
| - поперечный(Y) ....360 | |||
| 4. Макс. ход револьверного | |||
| суппорта(Z,R),мм .. 560 | |||
| 5. Количество скоростей шпинделя .. 12 | |||
| 6. Пределы скоростей | |||
| шпинделя, об/мин .. 32-1400 | |||
| 7. Количество рабочих подач ..... 18 | |||
| 8. Скорость перемещения | |||
| стола, мм/мин ..500-3800 | |||
| 9. Скор. перем. суппорта, мм/мин . до 4000 | |||
| 5 | Фрезерная | Фрезерный | 1. Размеры стола |
| операция | станок с | - длина, мм..................1600 | |
| ЧПУ | - ширина.....................400 | ||
| 6Р13Ф3-01 | 2. Расстояние от оси шпинделя до | ||
| вертикальных направляющих станка, | |||
| мм.........................500 | |||
| 3. Расстояние от торца шпинделя до | |||
| стола, мм................70-450 | |||
| 4. Наибольший ход стола | |||
| продольный, мм.............1000 | |||
| поперечный, мм.............400 | |||
| 5. Наибольший ход ползуна, мм 150 | |||
| 6. Вертикальный ход стола, мм 580 | |||
| 7. Диапазон скоростей вращения | |||
| шпинделя, об/мин........40-2000 | |||
| 8. Число скоростей............18 | |||
| 9. Диапазон подач стола, салазок, | |||
| ползуна, мм/мин.........20-1200 | |||
| 10. Мощность главного привода, | |||
| кВт......................7.5 |
Таблица 8.1. ( продолж.)
| 1 | 2 | 3 | 4 |
| 9 | Координатно- расточная | Координат-но расточной станок |
1. Размер рабочей поверхности стола (длин.´шир.), мм ... 400´700 2. Шпиндель |
| с ЧПУ | - частота вращения, об/мин. 45-2000 | ||
| 2Д132МФ2 | - вылет................. 475 мм. | ||
| 3. Мах диаметр сверления заготовки | |||
| из стали 45, мм ....... 32 | |||
| 4. Точность, мм | |||
| - отсчета координат ....... 0.001 | |||
| - установки координат ..... 0.008 | |||
| 5. Подача, мм/мин | |||
| - стола ................ 50-220 | |||
| - салазок .............. 50-220 | |||
| 6. Система программного упр. ...2П32-3 | |||
| 7. Число одновременно управляемых | |||
| координат .............. 2 | |||
| 8. Габариты, мм ........... 7000´4800 | |||
| 7,8 | Шлифоваль-ная операция | Универсальный круглошлифовальный |
1. Макс. Диаметр детали, мм ........400 2. Мах длина детали, мм .........1000 3. Диаметр шлифования, мм - наружного ............... 8-400 |
| станок 3140 | - внутреннего ............ 30-200 | ||
| 4. Макс. Продольное перемещение | |||
| стола, мм............... 920 | |||
| 5. Скорость вращения шпинделя | |||
| передней бабки, об/мин .....40-375 | |||
| 6. Скорость вращения шлифовального | |||
| круга, об/мин | |||
| - наружное шлифование .......1650 | |||
| - внутреннее шлифование .....7000 | |||
| 7. Габариты ......... 4480´2070´1675 |
9. Выбор режущих инструментов
Выбор режущих инструментов осуществляется в зависимости от метода обработки, формы и размеров обрабатываемой поверхности, ее точности и шероховатости, обрабатываемого материала, заданной производительности и периода стойкости (замены) инструмента.
По возможности используются стандартные инструменты.
Выбранные инструменты сведены в таблицу 9.1.
Режущие инструменты
Таблица 9.1
| Наименование | Наименование и | Марка | Примечания |
| технологических | обозначение | режущего | |
| переходов и | режущего | материала | |
| операций | инструмента | ||
| 1. Токарная | |||
|
2.1 Подрезать торец Æ175 |
Резец токарный сборный проходной с f=45 с механическим | по ГОСТ |
B=16 H=16 |
| 2.2 Точить | креплением твердосплавных | 19052-80 | H1=16 |
| поверхность | пластин ГОСТ 21151-75 | H2=18 | |
| Æ175´60 | 2102-0171 | ||
| 2.3; 2.4 | |||
| 2.6 Сверлить | Сверло перовое сборное с плас | Быстроре- | D=60 |
| отв. Æ60 | тинами из быстрорежущей | жущая сталь | L=291 |
| стали 2302-018-000-06 | 035-2000- | l=140 | |
| 1590 | |||
| 2.7 Расточить | Резец токарный сборный | Режущие | H=24 |
| отв. Æ62 | расточной с механическим | пластины по | D=28 |
| креплением пластин с f=92 | ГОСТ 19048- |
Dр.min=22 |
|
| К.01.4499.000 | 80 | ||
| 2.8 Снять фаску | Резец токарный сборный | по | H=16 |
| Æ175 2´45° | проходной с f=45 с | ГОСТ 19052- | B=16 |
| 1.1(3.1) Подрезать торец Æ60 |
механическим креплением твердосплавных пластин |
-80 |
H1=16 H2=18 |
| предварительно | ГОСТ 21151-75 2102-0171 | ||
| 1.2, 1.3 Точить | |||
| цилиндрические | |||
| ступени Æ85, Æ50 предварит. |
| 1.5; 3.7; 3.8 | Резец токарный сборный | по | H=16 |
| Точить поверх- | проходной с f=45 с | ГОСТ 19052- | B=16 |
| ности Æ120,Æ60 | механическим креплением | -80 | H1=16 |
| твердосплавных пластин | H2=18 | ||
| ГОСТ 21151-75 2102-0171 | |||
| 1.7.Сверлить | Сверло спиральное с | T5K10 | d=13.0 |
| отв. Æ13 | коническим хвостовиком Æ13 | L=180 | |
| ОСТ2 И20-2-80 035-2301-1029 | l=100 | ||
| 3.2, 3.3 Точить цилиндрические ступени Æ50, Æ85 окончат. | Резец токарный сборный с регулировочными винтами для проточки наружных канавок ТУ 2-035-588-77 | ||
| 3.4 Точить | Резец токарный сборный с | Твердо- | H=32 |
| канавку | регулировочными винтами для | сплавные | B=25 |
| проточки наружных угловых | пластины | L=125 | |
| канавок К.01.4528.000 | a=2.8 | ||
| 4.1 Сверлить | Сверло спиральное с | T5K10 | d=13.0 |
| 4 отв. Æ13 | коническим хвостовиком Æ13 | L=180 | |
| ОСТ2 И20-2-80 035-2301-1029 | l=100 | ||
| 4.2 Сверлить | Сверло спиральное с | T5K10 | d=9.0 |
| 2 отв. Æ9 | коническим хвостовиком Æ9 | L=170 | |
| ОСТ2 И20-2-80 035-2301-1017 | l=90 | ||
| 4.3 Зенковать | Зенковка коническая | Конус 120° | |
| 2 отв. Æ9 | ГОСТ 14953-80 | Æ10-100 | |
| 4.4 Сверлить | Сверло спиральное с | T5K10 | d=19.0 |
| 3 отв.Æ19 | коническим хвостовиком Æ19 | L=235 | |
| ОСТ2 И20-2-80 035-2301-1055 | l=135 | ||
| 5.Фрезеровать | Фреза концевая с коническим | D=18 | |
| контур траверса | хвостовиком ОСТ2 И62-2-75 | L=120 | |
| 035-2223-0103 | l=36 | ||
| 9.1.Расточить | Развертка машинная цельная | D=10 | |
| точные отв. Æ10 | быстрорежущая с коническим | L=140 | |
| хвостовиком ОСТ2 И26-1-74 | l=29 | ||
| 035-2363-1041 | |||
| 8.1.Шлифовать | Круг шлифовальный для | Материал А | D=200 |
| крепежную часть | круглошлифовальных станков | Связка К | d=32 |
| ГОСТ 2424-67 Форма ПП | H=10 | ||
| 8.2.Шлифовать | Круг шлифовальный для | Связка К | D=400 |
| торцы | плоскошлифовального станка | d=203 | |
| ГОСТ 2424-67 | H=10 |
Выбор приспособлений осуществлялся по возможности из числа стандартных или из типовых конструкций станочных приспособлений.
Критерием выбора является вид механической обработки, точность обработки поверхности, габаритные размеры и масса заготовки, тип станка, расположение поверхности по отношению к технологическим базам.
10.1. Станочные приспособления
При выборе станочных приспособлений учитывались:
- вид механической обработки;
- модель станка;
- режущие инструменты;
- тип производства.
Станочные приспособления
Таблица 10.1.
| Опер. | Наименов. операции | Наименов. приспособ | Обозначен. приспособ |
| 1-3 | Токарная | Трехкулачковый самоцентрирующий патрон | Патрон 7100-0063 П ГОСТ 2675-80 |
| 4 | Сверлильная | Тиски станочные | Тиски 7200-0232 ГОСТ 14904-80 |
| 5 | Фрезерная | Универсальный сборный, круглый накладной кондуктор УСП-12 | ГОСТ 21676-76 |
| 8 | Шлифовальные операции | Трехкулачковый самоцентрирующий патрон | Патрон 7100-0063 А ГОСТ 2675-80 |
10.2 Выбор инструментальных приспособлений
При выборе инструментальных приспособлений учитывались:
- вид механической обработки;
- конструкция посадочного места станка;
- форма и размеры инструмента ( его хвостовика ).
Инструментальные приспособления
Таблица 10.2
| Опер. | Наименов. операции | Наименов. приспособ | Обозначен. приспособ |
| 1,2,3 | Токарная | Резцедержатель с | 1-50 ОСТ2 П15-3-84 |
| цилиндрическим | D=50 | ||
| хвостовиком и | l=60 | ||
| с перпендикулярным | L=138 | ||
| открытым пазом | B=100 | ||
| b=25 | |||
| 4.1 | Сверлить отверстия | Втулки переходные с | Втулка40-2-50 |
| 4.2 | хвостовиком конус- | ОСТ2 П12-7-84 | |
| 4.3 | ностью 7:24 и внут- | ||
| реним конусом Морзе | |||
| к станкам с ЧПУ | |||
| 5 | Фрезерная | Патрон цанговый | ГОСТ 26539-85 |
| 1-30-2-100 | d=10-25 | ||
| l<100 | |||
| 6 | Расточная | Оправка для полу- | ГОСТ П1417-84 |
| чистового раста- | |||
| чивания 6504-0003 |
11. Выбор средств измерений и контроля размеров
Выбор средств измерения и контроля будем производить для наиболее ответственных параметров детали:
- Габаритные размеры
1. Длина
2. Диаметр Æ175
- Диаметр крепежной части
- Диаметр точного отверстия Æ10
3. Треугольное гнездо
Измеряется по соответствующим шаблонам (проходной и непроходной).
4. Остальные отверстия
Измеряются калибрами пробками соответствующих размеров.
Данные выбора приведены в таблице 11.1.
Таблица 11.1
|
Вид операции контроля |
Наименование и марка прибора |
Метрологическая характеристика |
| 1. Измерение | Штангенрейсмас ( с | Предел измерения 40-400 мм. |
| Длины детали | отсчетом по нониусу ) | Цена деления 0.05мм. |
|
L=180h14-1.15 |
41Р по ГОСТ 164-80 | Вылет измерит. Губок 80мм. |
| Погрешность ±0.05мм. | ||
| 2. Измерение диаметра | Штангенрейсмас 41Р | Предел измер. 100-1000 мм. |
|
D=Æ175h14-1 |
ГОСТ 164-80 | Цена деления 0.1мм. |
| Вылет измерит. Губок 125 мм | ||
| Погрешность ±0.1мм. | ||
| 3. Измерение диаметра | Гладкий микрометр | Цена деления 0.01мм. |
| крепежной | по ГОСТ 6507-78 | Диапазон измерений 0-300мм. |
|
Части Æ50-0.05 |
Погрешность ±2¸±6 мкм. | |
| 4. Измерение | Нутромер с измерит. | Диапазон 10-18мм. |
| Диаметра точного | головкой по | Цена деления 0.002мм |
|
отв. Æ10+0.016 |
ГОСТ 9244-75 тип 106 | Погрешность ±0.0035мм. |
| Наиб. глубина измер. 100мм. | ||
| Измерительное усилие 4Н. |
Измерение взаимного расположения точных отверстий Æ10 производится на оптическом столе координатно-расточного станка.
Методика измерений может быть предложена следующая: измерению подвергается, например, каждая десятая деталь партии и если обнаруживается отклонение от допустимых погрешностей изготовления то проверяются все следующие детали, в случае если количество отбраковки превышает среднестатистический уровень производится контроль металлорежущего оборудования.
12. Выбор режимов резанияРежимы резания зависят от обрабатываемого материала, от материала режущей части инструмента, от шероховатости поверхности, от ее конфигурации, от величины припуска на об работку.
Принята следующая последовательность назначения режимов резания: сначала назначают глубину резания, затем задают величину подачи, потом скорость резания, затем скорость вращения шпинделя станка:
n = ![]()
Расчетно-аналитическим методом вычислим режимы резания для токарной обработки. Глубина резания назначается в зависимости от вида обработки, т.к. обработка черновая выбираем t = 2 мм. По таблицам в [3] в зависимости от диаметра обрабатываемой поверхности выбираем значение подачи s = 1мм/об. для диаметра Æ175мм. Скорость резания рассчитывается по эмпирической формуле:
v = vтб × Kv = ![]() · Kmv × Kпв ×
Kив
· Kmv × Kпв ×
Kив
Kmv = Кг × ![]()
Для углеродистой стали Kг = 1; sв = 600; для резца nv = 1.75 .
Kпв — коэффициент, учитывающий состояние поверхности заготовки, равен 0.8 для поковки.
Kив — коэффициент, учитывающий вид инструментального материала, для ВК8 равен 0.4.
Время износа материала резца для одноинструмантальной обработки 30¸60мин.
Показатели степеней x, y, m и коэффициент Cv по таблицам для значения подачи 1 мм/об и наружного продольного точения:
Cv = 350; x = 0.15; y = 0.35; m = 0.20.
После расчета получаем значение скорости резания 150 м/мин.
13. Техническое нормирование времени операцийТехническое нормирование времени операций можно выполнить расчетно-аналитическим методом. В нашем случае, в мелкосерийном производстве рассчитывается норма штучно - калькуляционного времени:
Тшт.к. = То + Тв + Ттех + Торг + Тп + Тп.з.,
где
То — Основное (машинное) время, вычисляемое как отношение длины рабочего хода инструмента к подаче (в минутах) его перемещения.
Тв — Вспомогательное время, включает в себя продолжительность всех вспомогательных ходов инструмента, включений, переключений станка, установки и снятия заготовки.
Ттех — Время технического обслуживания
Ттех = 0.06 ( То + Тв )
Торг — Время организационного обслуживания
Торг = 0.06 ( То + Тв )
Тп — Время регламентированных перерывов
Тп = 0.025 ( То + Тв )
Тп.з. — Подготовительно-заключительное время
Тп.з. = 60 / р = а × 60 / N ,
где
р — размер партии
N — годовая программа выпуска
a — количество запусков партии в течении года
Тп.з. = 12 × 60/1000 = 0.72 (мин.)
Нормы времени представлены в таблице 5.
14. Выбор средств транспортировки заготовокДля выполнения транспортных и загрузочно-разгрузочных операций используется безрельсовая транспортная тележка -транспортный робот " Электроника НЦТМ-25". Особенностью данного транспортного робота является оснащение его автономным источником питания, микропроцессорным устройством управления, обеспечивающим слежение за трассой в виде светоотражающей полосы и загрузочно-разгрузочным столом, на котором устанавливается тара и сменные спутники. На стойке робота автоматически устанавливается или снимается тара при помощи подъемного загрузочно-разгрузочного стола, смонтированного на тележке. Подъем грузовой платформы осуществляется с помощью выдвижных штырей; высота ее подъема 150 мм. В корпусе автоматической тележки смонтированы электроприводы движения и поворота с питанием от аккумуляторов. Тележка выполнена в виде шасси с двумя ведущими колесами, установленными на поперечной оси в центре шасси и четырьмя опорными колесами спереди и сзади. Фотоэлектрические датчики для слежения за трассой по светоотражающей полосе, нанесенной на полу, расположены с двух сторон в нижней части шасси. В корпусе тележки расположены также датчики контроля за состоянием отдельных узлов. Безопасность эксплуатации обеспечивается механическим отключением привода от дуги, срабатывающего в случае касания ею препятствия.
Информацию о маршруте движения робокара получает на станциях останова, размещенных у склада и оборудования, посредством оптоэлектронной системы обмена информацией без электрического контакта.
Технические характеристики:
Грузоподъемность, кг 500
Скорость движения по светоотражающей полосе, м/с 0,2...0,8
Радиус поворота, мм 500
Погрешность позиционирования, мм:
поперечная +0,5
продольная +20
Удельная потребляемая мощность, Вт/кг 0,12
Длительность работы при двухсменной работе с под-
зарядом аккумуляторных батарей, ч 500
Габаритные размеры, мм 2200х700х300
Масса, кг 290
15. Программирование станка с ЧПУ15.1 Схема технологической наладки токарного станка с ЧПУ для чистовой токарной операции (3) приведена на рис 15.1
15.2 Перемещения режущего инструмента при чистовой токарной обработке приведены в таблице 15.1.
Таблица перемещений резцов станка с ЧПУ
Таблица 15.1
| Адрес инструмента | № участка траектории, знак и величина перемещения | ||||
| Т101 | 1 X–75.5 | 2 X–27 | 3 X+102.5 | ||
| Z–20 | Z+20 | ||||
| T102 | 1 Х–75.5 | 2 X–7 | 3 | 4 Х+37 | 5 |
| Z–29 | Z–35 | Z–34 | |||
| 6 X–19.5 | 7 | 8 Х+65 | |||
| Z–31 | Z–140 | ||||
| T103 | 1 X–80.7 | 2 X–3.9 | 3 X+3.9 | 4 X+80.7 | |
| Z–74.2 | Z–3.9 | Z+3.9 | Z+74.2 | ||
| T104 | 1 Х–82.5 | 2 X+35 | 3 X+10 | 4 Х–36.5 | 5 X–3 |
| Z–75 | Z–57 | ||||
| 6 X+3 | 7 Х+40.5 | 8 Х+3 | 9 Х+20 | ||
| Z–3 | Z–3 | Z+143 | |||
| T105 | 1 X–75.5 | 2 Х–2 | 3 | 4 X+32 | 5 X–2 |
| Z–20 | Z–10 | Z–46 | |||
| 6 | 7 X–14.5 | 8 X–3 | 9 Х+20 | 8 X+25 | |
| Z–10 | Z–10 | Z–3 | Z+98 |
15.3 Применяемые команды станка с ЧПУ.
G - подготовительная функция 01,10,11 для линейного перемещения;
03, 30, 31 - для движения против часовой стрелки;
X,Z - задают относительное смещение в координатах станка;
S - задает скорость вращения шпинделя;
F - задает величину подачи;
M - Вспомогательная функция;
T - Смена инструмента;
15.4 Программа для токарного станка с ЧПУ
%
N001 G27 S028 M104 T101
N002 G58 Z+000000 F70000
N003 G58 X+000000 F70000
N004 G26
N005 G01 F10200 L131
N006 X-15100 Z-02000 F10600
N007 X-05400 F10056
N008 X+20500 Z+02000 F70000
N009 G40 F10200 L31
N010 T102
N011 G26
N012 G01 F10200 L32
N013 X-15100 Z-02900 F10600
N014 X-01400 F10050
N015 Z-03500 F10024
N016 X+07400 F10600
N017 Z-03400
N018 X-03900
N019 Z-03100 F10024
N020 X+13000 Z+14000 F70000
N021 G40 F10200 L31
N022 T103
N023 G26
N023 G01 F10200 L33
N024 X-16140 Z-07420 F10600
N025 X-00780 Z-00390 F10024
N026 X+00780 Z+00390 F10120
N027 X+16140 Z+07420 F70000
N028 G40 F10200 L31
N029 T104
N030 G26
N031 G01 F10200 L32
N032 X-16500 Z-07500 F10600
N033 X+07000 F10120
N034 X+02000 F10600
N035 X-07300 Z-05700
N036 X-00600 F10200
N037 G03 X+00600 Z-00300 I+00600 F10120
N038 X+08100 F10120
N039 X+00600 Z-00300
N040 X+04000 Z+14300 F70000
N041 G40 F10200 L31
N042 T105
N043 G26
N044 G01 F10200 L32
N045 X-15100 Z-02000 F10600
N046 X-00400 F10200
N047 Z-01000 F10120
N048 X+06400 Z-04600 F10600
N049 X-00400 F10200
N050 Z-01000 F10120
N051 Z-00200 F10056
N052 X-03900 Z-02000 F10120
N053 G03 X+00600 Z-00300 I-00600 F10120
N054 X+02000 F10600
N055 G40 F10200 L35
N056 G25 X+99999 F70000
N057 M105
N058 G25 Z+99999
N059 M002
16. Технико-экономическое обоснование разработанного технологического процессаНаиболее точным методом расчета себестоимости вариантов технологических процессов при их сопоставлении является элементный метод или метод прямого расчета всех составляющих себестоимости.
В отдельных случаях при расчете можно не учитывать затраты, которые во всех сравниваемых вариантах остаются постоянными, и определять себестоимость только по затратам, зависящим от сравниваемых технических процессов. Такая не полная себестоимость, включающая в себя не только затраты, обусловленные вариантом технологического процесса, называется технологической себестоимостью Ст. Она в общем случае соответствует цеховой себестоимости и состоит из:
Ст = Сз + Сзн + С7 + Св + Среж + См + Са + Ср + Сп + Спл + Со + Сисх.заг ,
где
Сз — заработная плата рабочих с начислениями;
Сзн — зарплата наладчиков с начислениями;
С7 — затраты на силовую энергию;
Св — затраты на вспомогательные материалы;
Среж — затраты на амортизацию, заточку и ремонт универсального и специального режущего инструмента;
См — затраты на амортизацию и ремонт универсального и специального мерительного инструмента;
Са — затраты на амортизацию оборудования;
Ср — затраты на ремонт и модернизацию оборудования;
Сп — затраты на ремонт и амортизацию приспособлений;
Спл — затраты на амортизацию, ремонт, отопление, освещение и уборку производственного помещения;
Со — затраты на общие цеховые расходы;
Сисх.заг — стоимость исходной заготовки;
При расчете себестоимости для мелкосерийного производства этот метод применяется с учетом укрупненных нормативов затрат.
Отдельные слагаемые себестоимости находят по соответствующим нормативам затрат (таблицам), отнесенным к часу или минуте работы станка.
Технологическая себестоимость операции отсюда будет равна произведению себестоимости станкочаса на общую трудоемкость операции.
Расчет технологической себестоимости сведен в таблицу 16.1.
Расчет себестоимости
Таблица 16.1
| Вид станка | Норматив затрат, коп./час | Время работы, час. | Сумма затрат, коп. |
| Токарный | 143.6 | 0.83 | 119.18 |
| Сверлильный | 121.2 | 0.16 | 19.40 |
| Фрезерный | 137.8 | 0.25 | 34.50 |
| Расточной | 200.0 | 0.3 | 60.00 |
| Шлифовальный | 167.8 | 0.3 | 50.34 |
| Итого | 283.42 |
Полная себестоимость детали равна 283 + 586 = 869 коп.
При норме прибыли около 30% оптовая цена хвостовика может составить 11 руб. 29 коп. по ценам 1980-х гг. или $16.
17. Исследовательская часть проекта
Технологические возможности обработки металлов ультразвуком
17.1. Ультразвуковые колебания
Ультразвуковыми называются упругие колебания материальной среды с частотой, превышающей предел слышимости человеческого уха (св. 18000 Гц.). Ультразвуковая энергия передается в виде волны. Основными величинами, характеризующими гармонические колебания, являются:
l — длина волны,
А — амплитуда колебаний,
f — частота колебаний,
Т — период колебаний.
Малые длины волн дают возможность ультразвуку распространяться в средах направленными пучками, получившими название ультразвуковых лучей. Ультразвуковые лучи получают увеличением частоты колебаний. Так, например, при частоте колебаний 100 кГц длина волны в твердом теле будет около 4 см. При волновом движении материальной точки в каждый момент времени частица обладает определенным значением смещения, скорости и ускорения. Ультразвуковые волны могут распространяться в любых упругих средах: жидких, твердых и газообразных. Различают три вида ультразвуковых волн: продольные поперечные и поверхностные. В твердых телах могут распространяться волны всех трех видов, в жидких и газообразных лишь продольные.
Если к какому-нибудь телу приложить силу, то в нем произойдут деформации, т.е. некоторое смещение одних частиц по отношению к другим. В результате может измениться как объем, так и форма тела. Таким образом, твердые тела обладают не только объемной упругостью, но и упругостью формы. Поэтому в твердых телах наряду с нормальными могут возникать и касательные напряжения сдвига, а вместе с ними и поперечные волны.
Скорость распространения продольных волн в стальном стержне равна 5170 м/с. В более толстых стержнях сказывается эффект поперечного сжатия — увеличение инерции в результате радиальных колебаний, что вызывает уменьшение скорости распространения продольных волн.
Распространение ультразвуковых волн в твердых телах сопровождается потерями энергии на внутреннее трение, теплопроводность и упругий гистерезис. Потери энергии зависят от физико-механических свойств и структуры материала.
Когда ультразвуковая волна попадает на границу раздела между двумя средами, то часть звуковой энергии из первой переходит во вторую, а часть энергии отображается обратно.
При этом распределение энергии между перешедшей в другую среду и отраженной от нее зависит от соотношения акустических сопротивлений этих сред.
17.2. Кинематика ультразвуковой обработки
Для любого процесса резания, в том числе и ультразвукового сопровождающегося скалыванием мельчайшей стружки, необходимо различать два движения: главное - движение резания и вспомогательное - движение подачи. При размерной ультразвуковой обработке главным движением надо считать продольные колебания инструмента с ультразвуковой частотой, которые являются источником энергии абразивных зерен. Рабочий ход осуществляется при перемещении инструмента вниз, холостой ход - при перемещении инструмента вверх.
Время одного периода:
T = Tр.х. + Tх.х.,
где
Tр.х. — время рабочего хода;
Tх.х. — время холостого хода.
Время рабочего хода:
Tр.х. = L / vр.х
Время холостого хода
Tх.х. = L / vх.х
где
L — длина рабочего хода инструмента, мм;
vр.х — средняя скорость рабочего хода;
vх.х — средняя скорость холостого хода инструмента.
Для применяемых диапазонов частот и амплитуд колебаний инструмента скорость главного движения при размерной ультразвуковой обработке находится в достаточно широких пределах 0.6 ¸ 6 м/с. Максимальная скорость колебаний в 1.5 раза больше чем средняя.
Вспомогательные движения — движения подачи при ультразвуковой обработке — могут быть различными:
продольная подача — sпр ,
поперечная подача — sпоп ,
круговая подача — sкр ,
в зависимости от вида движения заготовки или инструмента. В зависимости от вида подачи или комбинации подач, а также профиля в продольном и поперечном сечении инструмента можно осуществлять различные операции ультразвуковой обработки.
Наибольшее промышленное применение получили процессы ультразвукового сверления, прошивания и резания, имеющие предельно простую кинематику — главное колебательное движение и продольную подачу.
17.3. Методы и технологические характеристики ультразвуковой
размерной обработки материалов
Большое распространение получил метод размерной ультразвуковой обработки твердых и хрупких материалов несвязанным абразивом, зерна которого получают энергию от инструмента, совершающего колебательные движения. Разрушение обрабатываемого материала происходит главным образом за счет ударного действия инструмента на частицы абразива. Колеблющийся инструмент, ударяя по абразивным зернам, сообщает им энергию. Абразивные зерна, ударяя по заготовке, откалывают небольшие частицы материала заготовки. В качестве абразива обычно применяют карбид бора, в качестве жидкость - воду. Относительно высокая производительность ультразвуковой обработки, несмотря на ничтожно малую производительность каждого единичного удара, обусловлена большой частотой колебания инструмента и большим числом зерен, одновременно движущихся с ускорением ( 20000-100000 зерен на см2 ). Съем материала происходит в основном с площадок, расположенных перпендикулярно к направлению колебания инструмента. Ультразвуковой способ обработки представляет собой сложный комплекс процессов, однако в основном съем материала происходит в следствие прямого удара зерен абразива об обрабатываемую деталь.
Производительность размерной ультразвуковой обработки можно оценить величиной подачи инструмента sпр, объемным и удельным съемом материала.
Средняя подача инструмента при обработке неглубоких отверстий без вывода инструмента для заполнения полости абразивом:
sпр1 = h1 / t1 ,
где
h1 — глубина обработки полости, мм;
t1 — время обработки, мин.
Средняя подача инструмента при обработке глубоких отверстий с выводом инструмента для заполнения полости абразивом:
sпр2 =  ,
,
где
n — число выводов инструмента;
t2 — время вывода инструмента.
Средний минутный съем обрабатываемого материала
Qv = sпр × F ,
где
F — площадь поперечного сечения инструмента.
При обработке глухих отверстий и полостей сплошным инструментом наиболее целесообразен критерий Qv, а при сквозной обработке производительность удобнее характеризовать величиной минутной подачи sпр. Величина подачи sпр численно равна удельной производительности ультразвуковой обработки. Под удельной производительностью понимают объем обрабатываемого материала, снятый единицей рабочей поверхности инструмента в единицу времени, т.е. отношение Qv к F. Производительность ультразвуковой обработки зависит от следующих основных факторов: физико-механических свойств обрабатываемого материала, амплитуды и частоты колебаний, статической нагрузки между инструментом и заготовкой, вида абразива, концентрации суспензии и способа ее подачи в зону обработки, площади инструмента и его износа, материала инструмента.
Точность ультразвуковой обработки. Под термином "точность ультразвуковой обработки" сквозных отверстий следует понимать стабильность зазора между контуром отверстия и инструментом. Этот зазор неизбежно возникает при ультразвуковом долблении, и если бы он был абсолютно стабилен, то при соответственно заниженных размерах инструмента можно было бы получить предельно точное отверстие. Колебания этого зазора создают поле допуска, определяющее точность обработки.
Кроме точности размеров контура, сквозное отверстие обработанное ультразвуковым методом, характеризуется конусностью полученного отверстия. Эта конусность возникает при ультразвуковом долблении и может изменяться в очень широких пределах.
Точность изготовления сквозных отверстий. Точность изготовления зависит главным образом от однородности применяемого абразива и наличия поперечных колебаний инструмента. Однородность абразива определяется соответствием размеров всех его зерен указанной в паспорте зернистости.
Утверждение, что в основном от качества абразива зависит точность обработки, предполагает выполнение с необходимой точностью как крепления и подачи инструмента, так и самого инструмента.
Износ инструмента на точность изготовления отверстий практически не влияет, так как изношенные участки инструмента по мере его углубления сменяются неизношенными участками, калибрующими отверстие.
В процессе обработки отверстия абразивные зерна, попадая между инструментом и боковыми стенками отверстия, вызывают износ как инструмента так и стенок отверстия.
Возникновение конусности отверстия и конусного пояска на выходе отверстия, в частности, объясняется различием длительности циркуляции абразива в зазоре между инструментом и боковыми стенками отверстия. Поясок на выходе остается потому, что в этом месте абразив циркулировал недостаточно долго.
Минимальный угол конусности, который удавалось получить при толщине твердого сплава 5¸10 мм, составляет 1.5¸2 мин.
Подача абразивной суспензии под режущую кромку инструмента фонтаном снизу через технологическое отверстие повышает точность отверстия.
Точность изготовления глухих отверстий. Точность изготовления глухих отверстий, а также точная обработка поверхностей деталей в основном ограничивается износом инструмента, так как при обработке глухого отверстия форма его является отпечатком инструмента.
Ввиду того, что величина подачи инструмента соизмерима с глубиной обработанного отверстия, то для получения заданных размеров отверстия приходится обрабатывать его методом последовательного приближения, многократно исправляя раз меры инструмента.
Для того чтобы уменьшить количество исправлений инструмента при обработке твердого сплава, целесообразно предварительно обрабатывать отверстия электроискровым методом, а ультразвуковой обработкой выполнять снятие припуска. Поскольку количество исправлений инструмента ничем не ограничено, то, очевидно, осуществляя необходимое их количество, можно, казалось бы, получить отверстие с любой заданной точностью. Таким образом, абразивный износ инструмента, обусловленный воздействием абразива, точности изготовления глухих отверстий не лимитирует. В действительности, точность изготовления глухих отверстий и обработки поверхностей ограничивается кавитационным износом инструмента, так как износ инструмента происходит не только из-за воздействия абразива, но и в связи с кавитационными явлениями в абразивной суспензии.
В некоторых точках поверхности инструмента его кавитационный износ может преобладать над абразивным. В этих точках образуются лунки, которые на поверхности детали создают выпуклости и горбы соответствующей формы. Высота этих выпуклостей соизмерима с глубиной обработки. Поэтому для получения точной поверхности необходимо осуществить обработку методом последовательного приближения, периодически исправляя инструмент. Глубина каждой последующей обработки должна быть меньше предыдущей.
17.4. Станки и инструмент для обработки ультразвуком
В настоящее время выпущено большое количество станков и установок для размерной ультразвуковой обработки. Для ультразвуковой размерной обработки разработана новая гамма копировально-прошивочных станков. В основу гаммы положены две универсальные базовые модели имеющие соответственно мощность генератора 0.1¸0.4 и 1.6¸2.5 кВт. На основе первой модели гаммы настольного исполнения разработан станок мод.4А771П повышенной точности, рассчитанный на работу с абразивной суспензией и алмазным инструментом. Он имеет вращающийся шпиндель и стол, перемещающийся по координатам. Станок предназначен для обработки отверстий, щелей и фасонных плоскостей. Станок оснащен устройством для правки, микроскопом для контроля размеров инструмента и амплитуды его колебаний. На базе второй модели разработаны и серийно выпускаются станки мод. 4Д772, 4Д772Э, 4Д772К. Станки с индексом Э оснащены источниками технологического тока, что позволяет вести электрохимическую ультразвуковую обработку.
Кроме универсальных станков, разработан ряд ультразвуковых станков специального назначения для сверления алмазных и твердосплавных фильер, отверстий в камнях самоцветах, резки полупроводниковых материалов. Для обработки алмазных фильер серийно выпускается станок мод. МЭ-76.
Схема ультразвуковой обработки приведена на рис.17.1
|
|
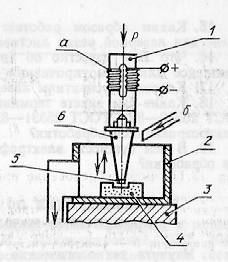
Рис.17.1. Схема ультразвуковой обработки:
1-магнитострикционный преобразователь;
2-ванна; 3-стол ультразвукового станка;
4-обрабатываемая заготовка; 5- инструмент;
6-концентратор; а-подвод тока от генератора;
б-подвод абразивной суспензии; Р-сила прижима инструмента к детали
18. Промышленный робот для обслуживания токарного станка с ЧПУ
Промышленный робот (ПР) — автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления, для управления в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и (или) технологической оснастки.
Для обслуживания одного станка возможно применить специализированного робота как, например, СМ40Ц.40.11 технические характеристики которого приведены ниже:
Грузоподъемность суммарная, кг...............................................40
Число рук/захватов......................................................................1/1
Число степеней подвижности.......................................................4
Тип привода.........................................................Гидравлический
Система управления........................................................Цикловая
Число программируемых координат...........................................3
Способ программирования перемещений...................по упорам
Погрешность позиционирования, мм.....................................±1.5
Наибольший вылет руки, мм...................................................1672
Линейные перемещения, мм:
— горизонтальные....................................................................760
— вертикальные........................................................................760
Скорость линейных перемещений, м/с:
— горизонтальных...............................Вперед-0.41; Назад-0.635
— вертикальных.......................................Вверх-0.212; вниз-0.38
Угловые перемещения, градусы........................................270,180
Масса, кг....................................................................................1400
Робот работает в цилиндрической системе координат и предназначен, в основном, для обслуживания одного станка; он имеет две системы управления - цикловую и ЧПУ - позиционную. В функции робота при обслуживании токарного станка с ЧПУ будет входить установка и съем детали, управление приспособлением закрепления детали, также необходима синхронизация работы робота и обслуживаемого станка с помощью согласованного интерфейса между ними, т.к. для обеспечения полной автоматизации необходимо управление включением/выключением станка роботом.
Вид и тип захватного устройства робота будут зависеть от формы обрабатываемой детали. Для деталей типа хвостовика возможно применение захвата типа С01, диапазон захвата которого 20¸150 мм.
Также необходимо применение тактового стола. Тактовый стол — предназначен для хранения запаса заготовок и подачи их в зону захвата ПР. Заготовку можно устанавливать непосредственно на пластину стола, если форма и размеры заготовки позволяют это сделать, либо на специальные приспособления - спутники, которые крепят к пластинам. Готовую деталь можно ставить на тактовый стол или в специальную тару. Тактовый стол выбирают исходя из габаритов и массы заготовок.
ЗАКЛЮЧЕНИЕ
В ходе курсового проектирования была разработана и проанализирована технология изготовления хвостовика на станках с ЧПУ с применением средств автоматизации начиная с выбора заготовки и заканчивая термообработкой и упаковкой детали.
Также была обоснована экономическая целесообразность внедрения разработанной технологии: выбор заготовки, обработка детали, затраты на ее изготовление,— с расчетом полной себестоимости готового изделия.
В теоретической части подробно описаны технологические возможности передовой, мало применяемой в нашей промышленности обработки металлов ультразвуком.
В целом курсовой проект вобрал в себя большую часть знаний и навыков полученных нами в теоретическом курсе ТМС, что помогло на конкретном примере закрепить их.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Горбацевич А.Ф., Шкред В.А. Курсовое проектирование: Учеб. пособие для вузов.— Минск: Выс. школа, 1983.— 256 с.
2. Ковшов А.Н. Технология машиностроения: Учебник для вузов.— М.: Машиностроение, 1987.— 320 с.
3. Хорбенко И.Г. Ультразвук в машиностроении.— М.: Машиностроение, 1974.— 280 с.
4. Размерная электрическая обработка металлов: Учеб. пособие для вузов/ Под ред. Глазкова А.В.— М: Выс. школа, 1978.— 336 с.
ПРИЛОЖЕНИЯ
Программа для сверлильного станка с ЧПУ Приложение 1
%
N001 T01 S10 F11 X+00000 Y+00000
N002 M03 L01 X+006062 Y+003500
N003 G81 M08 R+026000 Z+32650
N004 M09 X-006002
N005 G81 M08 R+026000 Z+32650
N006 M09 Y-003500
N007 G81 M08 R+026000 Z+32650
N008 M09 X+006062
N009 G81 M08 R+026000 Z+32650
N010 T102 S10 F09 X+000000 Y+000000
N011 M09 L02 X+00000 Y+007000
N012 G81 M08 R+026000 Z+032550
N013 M09 Y-007000
N014 G81 M08 R+026000 Z+032550
N015 T03 S10 F13 X+00000 Y+00000
N016 M08 L03 X+007000 Y+00000
N017 G81 M08 R+026000 Z+029000
N018 M09 Y+060621 X-0035000
N019 G81 M08 R+026000 Z+029000
N020 M09 Y-060621 X-003500
N021 G81 M09 R+026000 Z+029000
N022 M09
N023 M02
Программа для фрезерного станка с ЧПУ Приложение 2
%
N001 G17
N002 M43
N003 S75 T01
N004 G01 Z-015500 F0712 M03 L401
N005 X-002800 F0614 M08 L802
N006 Y-004832
N007 G03 i+000010 X+000010 Y-000010 L802
N008 j+000010 X+000005 Y+000002 L802
N009 G01 X+008370 Y+004832
N010 G03 i+000006 j+000008 X+000004 Y+000008 L802
N011 i+000010 X-000004 Y+000008 L802
N012 G01 X-008370 Y+4832
N013 G03 i+000005 j+000008 X-000005 Y+000002 L802
N014 j+00010 X-000010 Y-000010 L802
N015 G01 Y-004832
N016 G50 X+002800 F0660 M09 L802
N017 G04 L000
N018 G01 Z+015500 F0712 M05
N019 G40 L401
N020 S76 T02
N021 G01 Z-017500 F0712 M03 L403
N022 X+005790 F0630 M08
N023 X+001260 F0580 L804
N024 G03 i+000050 X-000025 Y+000043 L804
N025 G01 X-010500 Y+006062
N026 G03 i+000025 j+000043 X-000025 Y+000007 L804
N027 j000050 X-000050 Y-000050 L804
N028 G01 Y-012124
N029 G03 i+000050 X+000050 Y-000050 L804
N030 j+000050 X+000025 Y+000007 L804
N031 G01 X+010500 Y+006062
N032 G03 i+000025 j+000043 X+000025 Y+000043 L804
N033 G01
N034 G50 X-007050 F0630 M09 L804
N035 G04 L000 F0660
N036 G01 Z+017500 F0712 M05 N036 G40 L403
| Привод торцовочного станка | |
|
... распространенных материалов, применяемых в различных отраслях народного хозяйства. Это объясняется тем, что она легко поддается обработке. При ... Выбор оборудования осуществляется на основании таких данных, как метод обработки, расположение, размеры обрабатываемых поверхностей, габаритных размеров заготовки, количество ... станок токарно-винторезный с ЧПУ модели 16К20ФЗС5, сталь 40Х ГОСТ 4543-71, подача S=0,3 мм/об, глубина резания t=2,5 мм. |
Раздел: Промышленность, производство Тип: дипломная работа |
| Технология обработки на станках с ЧПУ | |
|
Министерство общего и профессионального образования Российской Федерации Дальневосточный Государственный технический университет Арсеньевский ... Какие специфические требования к конструкции режущего инструмента для станков с ЧПУ и какие его конструкции вы знаете? Работа 4. Подготовка УП и операционных карт для обработки детали на токарном станке с ЧПУ. |
Раздел: Рефераты по технологии Тип: реферат |
| Изготовление детали "кронштейн" | |
|
Техническое задание Реферат Содержание Введение 1. Разработка технологического процесса 1.1. Служебное назначение и техническая характеристика детали ... При обработке твердосплавной концевой фрезой с подачей на зуб S Z = 0,14 мм/зуб, числом зубьев Z = 2, скоростью резания v = 3,14-20 6360/1000 = 396,89 м/мин 21. Гжиров Р.Н., Серебреницкий П.П. Программирование обработки на станках с ЧПУ: |
Раздел: Промышленность, производство Тип: дипломная работа |
| Билеты по технологии отрасли | |
|
№1. История развития и роль машиностроения в обществе. Человеку необходимы для существования - материальные блага, которые черпают из природы ... - особенность заключается в том, что столб перемещается с высокой точностью по координатам X Y. Предназначены для обработки деталей с очень точно расположенными отверстиями. С позиционной системой ЧПУ, управляется автоматически инструментом от точки к точке, на пути осущ. обработка:(сверлильные станки). |
Раздел: Рефераты по технологии Тип: реферат |
| Разработка автоматизированного участка изготовления детали " ... | |
|
Министерство образования и науки Российской Федерации Зеленодольский механический колледж Разработать автоматизированный участок изготовления детали ... Обычно наиболее трудоемкой предварительной операции обработки деталей этой группы являются токарная обработка при закреплении заготовки в патроне. Установку деталей на станок и снятие их со станка производят при отведенном в исходное положение шпинделе с режущим инструментом, за исключением случая, когда станок оснащен ... |
Раздел: Промышленность, производство Тип: дипломная работа |