Реферат: Электропривод
Пермский государственный технический университет.
Кафедра электрификации и автоматизации
горных предприятий.
Курсовая работа.
« Расчёт и выбор оборудования электропривода
по системе генератор-двигатель»
Выполнил студент группы
ЭПУ-97 Олейник В. В.
Принял: Васильев Б. В.
Пермь 1999 г.
ПЕРМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра ЭАГП_________
Утверждаю:
Зав. кафедрой А. Д. Динкель
« ___ « ____________ 1999 г.
Задание
по курсовому проектированию
Студенту Олейнику Виктору Владиславовичу____________________
I. Тема проекта Расчёт параметров и выбор электрооборудования ___
___________по системе “Генератор-двигатель”_____________________ ________________________________________________________________________________________________________________________________________________________________________________________________
II. Срок сдачи законченного проекта _______20 января 1999 г._______
III. Исходные данные к проекту:
а) программа и стабильность ______ ________________________________
__ ___ ____
б) режим работы ______курсовая работа____ _____________________
в) наименование объекта________________________________________
г) особые указания_____________________________________________
___ _ F1= 13т; F2= 16.25т; F3= 10.5т; F4= 3.3т; F5=5.3т;____ __________________ __t1=13; t2=20; t3=52; t4=20; t5= 13;___________ _ _________________ _ n1=n4= 4 об/мин_____ ______________
_______________________________n2=n3=26об/мин____________________ ______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ _______________________
IV. Содержание расчётно-пояснительной записки, перечень подлежащих разработке вопросов:
1. Введение__________________________________________
2. Расчёт мощности двигателя, техническая_______________ характеристика выбранного двигателя__________________ __________
3. Расчёт параметров и выбор другого силового___________ электрооборудования (в соответствии с составленной силовой_________ схемой)._______________________________________________________
4. Составление структурной схемы электропривода_ _ (включая___ САР).____ _ ____________________ ____
5. Расчёт параметров структурной схемы_САР привода. _ ______ _
_____________ ___
6. Расчёт статических характеристик привода:______ _ регулировочных,_механических характеристик в разомкнутой_________ и_замкнутой системах.__ _________
7. Расчёт переходных процессов в разомкнутой и замкнутой___
системах.______________________________________________________
8. Выводы._ ________________________________________
Дата выдачи задания « ____» ________________ 1999г.
Консультант __________________
Задание принято к исполнению ____________________
Разработал _______ /Олейник В.В./
2. Содержание.
1. Задание.
2. Содержание.
3. Введение.
4. Силовая схема привода.
5. Расчет и выбор силового электрооборудования привода.
6. Составление структурной схемы привода и расчет ее
параметров
7. Расчет статических характеристик привода.
8. Расчет регулировочной характеристики привода.
9. Расчет динамических х ар актеристик привода.
10. Заключение.
11.Список литературы
3. Введение.
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя различные линейные и нелинейные элементы (двигатели, генераторы, усилители, полупроводниковых и другие элементы), обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики.
Электропривод по системе Г-Д с тиристорным возбуждением генератора находит ш ирокое применение во многих отраслях промышленности. Достаточно сказать, что большинство мощных электроприводов постоянного тока различного назначения выполнены по системе Г-Д. Это объясняется рядом ее важных преимуществ по сравнению с другими приводами;
-высокая жесткость механических характеристик;
-ббольшой диапазон и плавность регулирования скорости;
-отсутствие пусковых сопротивлений и потерь энергии в них;
-простота реверса двигателя без переключений в цепи якоря;
-ппростота перевода привода в режимы торможения с рекуперацией энергии в сеть;
-относительная простота схемного решения системы управления приводом, не требующая высокой квалификации обслуживающего персонала. Наряду с перечисленными достоинствами система Г-Д не лишена существенных недостатков, к числу которых относятся:
- недостаточное быстродействие привода;
- неустойчивая работа двигателя в зоне низких скоростей, ограничивающая диапазон регулирования;
- низкий коэффициент полезного действия , не превышающий 75-80 % ;
- высокая установленная мощность, равная трехкратной мощности регулируемого двигателя; - большая занимаемая площадь.
5. Расчет и выбор силового электрооборудования привода. Выбор двигателя.
Исходные данные:
F1=13т; F2=16.25т; F3=10.5т; F4=3,3т; F55.3т
t1=13сек; t2=20сек; t3=52сек; t 4=20сек; t5=13сек
время паузы: t6=100сек.
Определяем эквивалентную мощность F экв:
Выбор двигателя должен удовлетворять неравенствам:
Pэф ![]() Pн.дв Iэф
Pн.дв Iэф ![]() Iн.дв Mэф
Iн.дв Mэф ![]() Mн.дв
Mн.дв
Произведя вычисления результаты, ко т орых удовлетворяют неравенствам, выбираем двигатель типа П2-18170-0.315
Технические характеристики двигателя.
Тип........................................................................................... П 2-18170 -0 .315 Мощность, кВт.......................................................................................... 315 Напряжение номинальное . В .. ..............…………………........................ 440 Напряжение возбуждения , В .....................................……........................ 220 Частота вращения номинальная, об/мин .. .................................................36 КПД , % ....................................................................................................... 78 Сопротивление обмотки при 15°, 0м
якоря..................................................................................................... 0,00895 добавочных полюсов............................................................................ 0,0012 Ток двигателя номиналь н ый, А ............................................................. 920 Динамический момент инерции 1000 кгм.................................................1.2
Произведем дополнительные вычисления :
мощность возбуждения:
Рв= 3% * P дв= 0.03*315 = 9.45 кВТ
ток возбуждения:
сопротивление возбуждения:
![]()
Выбор генератора.
Генератор выбираем по напряжению и мощности двигателя.
![]()
По параметрам удовлетворяет генератор типа П-142-6К
Краткая техническая характеристика генератора П-142-6К
Тип _______________________________________________П-142-6К
Мощность, кВт__________________________________________ 430
Напряжение якоря, В _____________________________________460
Номинальная частота вращения, об/мин_____________________1000
Вычислим ток якоря генератора:
![]()
Выбранный нами генератор удовлетворяет неравенствам:
Uном.г ![]() Uном.д, т.е. 460 (В)
Uном.д, т.е. 460 (В) ![]() 440
(В)
440
(В)
Iя.ном.г ³ Iя.ном.д , т.е. 1000 (А) ³ 920 (А)
Выбор гонного двигателя.
Основной критерий выбора гонного двигателя - это равенство скоростей вращения якоря генератора и ротора гонного двигателя
Кроме того нужно учитывать:
где
Uгон.д- напряжение гонного двигателя, В;
Pгон.д – мощность гонного двигателя, кВт.
![]()
По параметрам подходит асинхронный двигатель АД-4
Краткая техническая характеристика двигателя АД-4.
Тип _____________________________________________________АД-4
Мощность, кВт _____________________________________________440
Скорость ротора, об/мин ____________________________________1000
Скольжение, % _____________________________________________1,5
КПД,% ___________________________________________________94,4
cos¦ , % ___________________________________________________0,86
Выбор тиристорного возбудителя двигателя.
Тиристорный возбудитель двигателя должен обеспечивать три режима:
- ослабленный;
- форсированный;
- нормальный.
В ослабленном режиме:
![]()
![]()
В номинальном режиме работы:
![]()
В форсированном режиме:
Uфор=(3¸4)Uв.ном.д=660В![]()
![]()
Мощность тиристорного возбудителя двигателя:
Sтвд = Uв.ном.дIв.ном.дKп
где
Kп = 1,04 ¸1,05 - повышающий коэффициент мощности трансформатора.
S твд = Uв.ном.д Iв.ном.д Kп = 220 *4З * 1,04 = 9838 ВА
По всем параметрам подходит нереверсивный тиристорный возбудитель: Тип_____________________________________________АТЕЗ-50/230Р-У4 Напряжение питания сети________________________________190-220 В Номинальный выпрямленный ток______________________________50 А Максимальный ток__________________________________________100 А Номинальная мощность ____________________________________11.5 кВт
Выбор тиристорного возбудителя для генератора.
Uтвг.max =1.15 U в.ном.г = 1,15 * 230=264,5В
Iном.твг = K зIв.ном.г = 1,15*58.6 = 66,7 A
По всем параметрам подходит реверсивный тиристорный возбудитель: Тип____________________________________________АТЕРЗ-50/230Р-У4 Напряжение питания сети ______________________________190-220 В Номинальный выпрямленный ток _________________________50 А Максимальный ток _______________________________________100 А Номинальная мощность ____________________________________11.5 кВт
Выбор автомата главного тока.
Автомат главного тока выбирают по максимальному току и выпрямленному напряжению.
Imax= 2,5Iд.ном = 2,5* 920 = 23 0 0 А
Тип выключателя_____________________ ВЛТ - 42-4000/6-А-У4 Номинальный ток _________________________________2500 А Номинальное напряжение ___________________________600 В
6. Составлени е структурной схе м ы привода и расчет ее параметров.
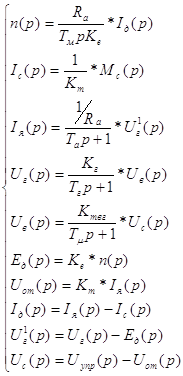
На рисунке представлена структурная схема электропривода по системе Г-Д с тиристорным возбуждением генератора.
Двигатель представлен колебательным звеном, а генератор и тиристорный преобразователь представлены апериодическими звеньями.
![]()
![]()
|
|
|
|
|

|
|
Mc(P)
Ic(P)
Uc(P) Uв(P) Uг(P) Uг(P) Iя(P) Iд(P)
Uупр(P) n(p)
Uom(P) Eд(P)
где
Uн.д - номинальное напряжения двигателя, В
1я.д - номинальный ток якоря двигателя, А
Rя.д - сопротивление якорной цепи двигателя, 0м
пн - номинальные обороты двигателя, об/мин
![]()
![]()
Определим сопротивление якорной цепи генератора
где
![]() -КПД генератора, о.е.
-КПД генератора, о.е.
Uн.г -номинальное напряжение генератора, В
Iн.г -номинальный ток генератора, А
![]()
Определим суммарное сопротивление якорной цепи двигателя и генератора
![]()
где
Rя.д -сопротивление якоря двигателя, 0м
Rд.п.д -сопротивление добавочных полюсов двигателя, 0м
Rя.г -сопротивление якоря генератора, 0м
Причем, сопротивления R , R, R , входящие в эту электрическую
цепь мы не учитываем т.к. их величины на два порядка меньше сопротивлений представленных в этой формуле.
Определим электромеханическую составляющую привода:
![]()
где
Jдв -момент инерции двигателя,
Jдв = 1.2Jдв -момент инерции рабочей машины,
g= 9,8 -ускорение свободного падения, м/с
![]()
Определим индуктивность якоря генератора:
![]()
где
Uном -номинальное напряжение генератора, В
1ном -номинальный ток генератора, А
пном -номинальная скорость вращения, об/мин
р = 6 -число пар полюсов генератора
Найдем суммарную индуктивность двигателя и генератора :
![]()
Определим постоянную времени якорной цепи привода:
![]()
Постоянная времени Тm = 0,003 д л я многоканальной СИФУ.
где
Рном -номинальная мощность генератора, кВт
nном -номинальное число оборотов генератора, об/мин

Найдём,
![]()
![]()
где U упр.max - максимальное напряжение управления В.
7. Расчет статических характеристик привода.
Для дальнейших расчетов необходимо преобразовать исходную
структурную схему.![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|
Mc(P)
Ic(P)
Uc(P) Uв(P) Uг(P) Uг(P) Iя(P) Iд(P)
Uупр(P) n(p)
![]()
![]()
|
|
|
Iя Iд
Ic
Mc
Для преобразованной структурной схемы запишем систему уравнений:
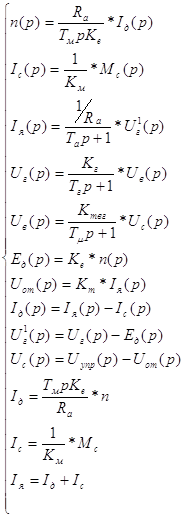
Воспользуемся методом подстановок приведенных выражений друг в друга и ориентируясь на то, что в левой части - скорость, а в правой - момент конечном выражении получим:
![]()
Предположим, что р= 0 ( дл я замкнутой системы):
Предположим, что Кт = 0 (разомкнутая система):
 |
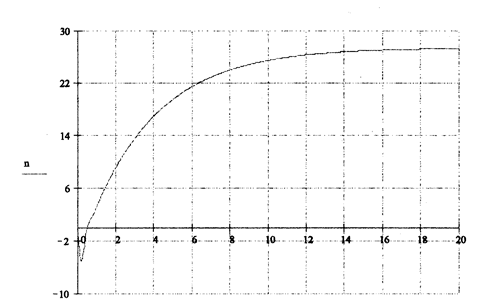
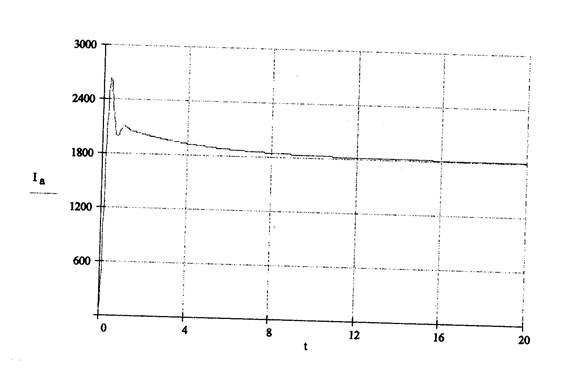
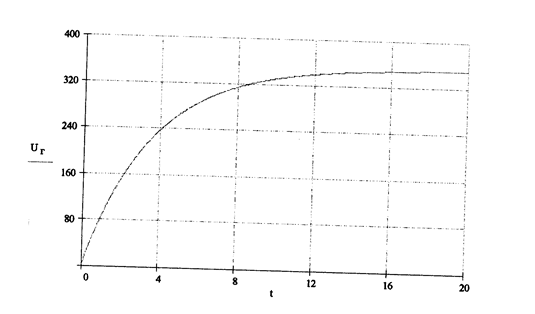
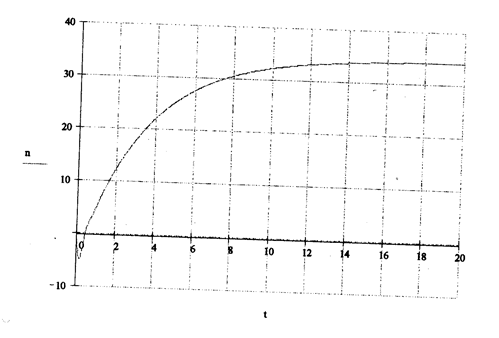
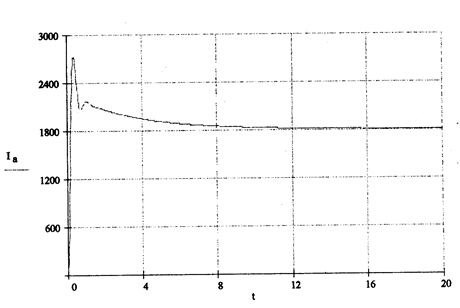
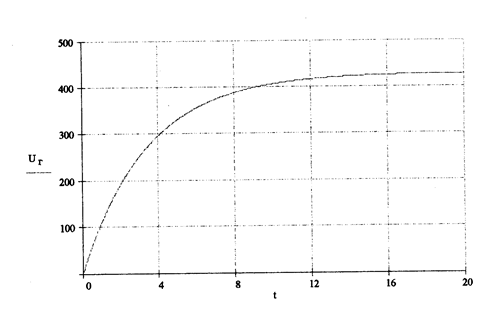
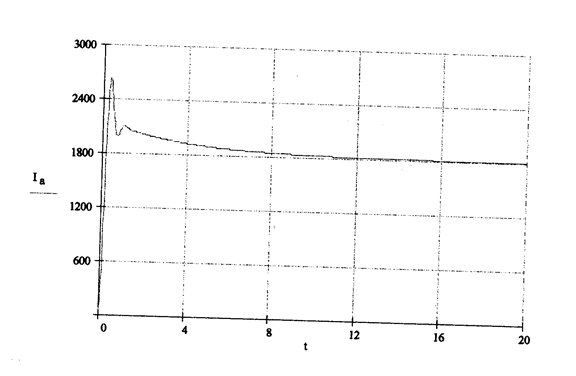
9. Расчет динамических характеристик привода.
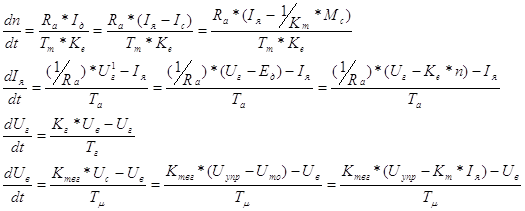
Преобразуем исходную систему
уравнений методом подстановки.
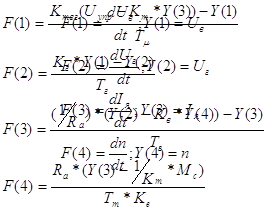 |
Сделаем замену и подставим в систему уравнений.
10. Заключение.
Выполняя данную работу, мы не только за кр епили пройденный теоретический материал, но и обрели некоторые практические навыки при проектировании данной системы электропривода и расчета ее параметров, что является важнейшим фактором нашей программы обучения. Также, используя необходимую справочною литературу, мы получили действительные представления о современных систем электроприводов и о большом к о личестве электрооборудования, используемом в настоящее время в электроприводе на различных предприятиях, в том числе, и горных.
II. Список литературы.
1. Комплектные тиристорные электроприводы: Справочник/Под ред. В.М. Перельмутера, 1988;
2. Автоматическое регулирование. : Н.Н. Иващенко, 1978г;
3. Теория электропривода: В.И. Ключев, 1985;
4. Примеры расчетов автоматизированного электропривода/Под ред. А.В. Бошарина, 1972г.
5 . Исследование характеристик электропривода по системе Г-Д с тиристорным возбу ж дением; методическое пособие/Под редакцией Б.В. Васильева 1986г.