Реферат: Каналы передачи информации
В настоящее время широко распространены автономные средства навигации ЛА. К их числу принадлежат и доплеровские измерители вектора скорости объекта. Наиболее распространенные из них – доплеровские измерители путевой скорости и угла сноса самолета (ДИСС).
Под путевой
скоростью ЛА обычно понимают горизонтальную проекцию его скорости относительно
земной поверхности. Путевая скорость W связана с
воздушной скоростью V и
скоростью ветра U навигационным
треугольником, в котором угол ![]() между
векторами воздушной и путевой скорости называется углом сноса, поскольку его
причиной является ветер. Доплеровский измеритель позволяет непосредственно
определить путевую скорость по спектру частот сигнала, отраженного земной
поверхностью, основываясь на эффекте Доплера, заключающемся в изменении частоты
отраженного от объекта сигнала в зависимости от скорости движения этого
объекта.
между
векторами воздушной и путевой скорости называется углом сноса, поскольку его
причиной является ветер. Доплеровский измеритель позволяет непосредственно
определить путевую скорость по спектру частот сигнала, отраженного земной
поверхностью, основываясь на эффекте Доплера, заключающемся в изменении частоты
отраженного от объекта сигнала в зависимости от скорости движения этого
объекта.
При горизонтальном полете летательного аппарата для обеспечения достаточно большой проекции вектора скорости W на направление облучения и для сохранения значительного отражения от поверхности в направлении ДИСС применяют наклонное облучение поверхности.
Если отражающие свойства поверхности в облучаемой площади примерно одинаковы, то форма огибающей спектра частот отраженного сигнала определяется формой ДНА измерителя в вертикальной плоскости. Максимальную мощность при этом имеет сигнал на средней частоте спектра, соответствующий направлению оси ДНА.
Для измерения
путевой скорости ЛА необходимо найти среднюю частоту доплеровского спектра ![]() . Если вектор W горизонтален и составляет с осью
ДНА угол
. Если вектор W горизонтален и составляет с осью
ДНА угол ![]() в горизонтальной и
в горизонтальной и ![]() в вертикальной плоскостях,
то:
в вертикальной плоскостях,
то:
![]()
Если
направление облучения совпадает с вектором W в
горизонтальной плоскости, то угол ![]() и
приращение достигает максимума:
и
приращение достигает максимума:
![]() .
.
Если известны ![]() и
и ![]() , то путевую скорость W можно определить непосредственным измерением
, то путевую скорость W можно определить непосредственным измерением ![]() с помощью частотомера.
с помощью частотомера.
Однолучевые радиоизмерители скорости, однако, не находят применения из-за очень низкой точности измерения. Неточность эта вызвана, в первую очередь, неточностью совмещения оси ДНА с вектором W из-за погрешности измерения. Второй важной причиной погрешностей измерения скорости однолучевым прибором является крен ЛА. Эта погрешность достигает 0.05% отклонения показаний прибора от истинной скорости на каждый градус крена летательного аппарата.
Погрешность крена можно компенсировать за счет стабилизации антенны ЛА в горизонтальной плоскости или введения поправок на крен при обработке данных в вычислительном устройстве. Однако это, естественно, приводит к усложнению и утяжелению вычислителя, не устраняя при этом органических недостатков однолучевого метода измерений, к которым также относятся высокие требования к стабильности частоты измеряемых колебаний.
Наиболее разумным способом увеличения точности измерения скорости является применение многолучевых измерителей, излучающих в двух, трех или четырех направлениях.
Многолучевые измерители вектора скорости, основанные на эффекте Доплера, делятся на самолетные и вертолетные. В самолетных ДИСС измеряется продольная и поперечная составляющие вектора скорости, тогда как в вертолетных системах измеряется еще и вертикальная составляющая скорости. Кроме того, у самолетных ДИСС заранее неизвестен знак вектора скорости, который может быть и нулевым в режиме зависания. Отличаются максимальные значения измеряемых скоростей, высотный потолок измерения – у самолетных систем они в десятки раз выше. Однако объем выходных данных вертолетных измерителей больше из-за необходимости измерения полного вектора скорости. Вертолетные ДИСС применяются также для осуществления мягкой посадки космических аппаратов, а самолетные – для управления крылатыми ракетами и экранопланами.
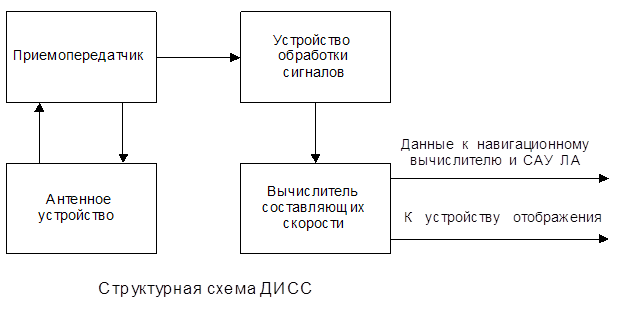 В состав измерителя вектора скорости, упрощенная структурная схема
которого представлена на рисунке, входят антенное устройство, формирующее три
или четыре луча, приемопередатчик, устройство обработки сигналов, вычислитель
составляющих скорости и устройство отображения. Обычно данные ДИСС
непосредственно вводятся в систему автоматического управления ЛА.
В состав измерителя вектора скорости, упрощенная структурная схема
которого представлена на рисунке, входят антенное устройство, формирующее три
или четыре луча, приемопередатчик, устройство обработки сигналов, вычислитель
составляющих скорости и устройство отображения. Обычно данные ДИСС
непосредственно вводятся в систему автоматического управления ЛА.
Рассмотрим принцип действия многолучевых ДИСС для горизонтального полета, при котором вектор W всегда направлен вперед, а вертикальная составляющая скорости отсутствует. Чтобы понять необходимость использования трех или четырех лучей, изучим сначала двулучевые системы.
При измерении
путевой скорости и угла сноса антенная система поворачивается до совмещения
спектров сигналов на выходе каналов приемника, соответствующих двум лучам
антенны. При этом ось симметрии лучей совмещена с вектором W,
а угол между этой осью и осью самолета равен углу сноса ![]()
![]() . Точность двулучевой
системы выше, чем у однолучевой, так как при повороте антенны лучи пересекают
линии равных частот под углом, близком к прямому, а это обеспечивает большую
чувствительность системы.
. Точность двулучевой
системы выше, чем у однолучевой, так как при повороте антенны лучи пересекают
линии равных частот под углом, близком к прямому, а это обеспечивает большую
чувствительность системы.
Если при
измерении равенство частот ![]()
![]() и
и ![]() установлено неточно то это
приводит к погрешности в определении угла сноса, однако почти в 30 раз меньшей,
чем у однолучевой системы. Однако погрешность из-за крена остается примерно
такой же, как у однолучевой системы, то есть неоправданно высокой.
установлено неточно то это
приводит к погрешности в определении угла сноса, однако почти в 30 раз меньшей,
чем у однолучевой системы. Однако погрешность из-за крена остается примерно
такой же, как у однолучевой системы, то есть неоправданно высокой.
Точность измерения путевой скорости значительно повышается при использовании двусторонних систем, имеющих лучи, направленные вперед и назад. Такое конструктивное решение позволяет снизить погрешности измерения путевой скорости еще в 3-5 раз. Однако погрешность измерения угла сноса остается почти такой же, как и у однолучевой системы.
Очевидно, что одновременное повышение точности измерения и угла сноса, и путевой скорости дает лишь применение в системе трех или четырех лучей.
Добившись поворотом антенной системы равенства разностных частот, можно определить угол сноса по положению антенной системы относительно оси самолета, а путевую скорость – по измеренной разностной частоте.
При
неподвижной относительно оси самолета антенной системе значения W и ![]() находят
путем решения несложных уравнений с помощью вычислительного устройства.
находят
путем решения несложных уравнений с помощью вычислительного устройства.
Четырехлучевая система сочетает в себе достоинства продольной и поперечной двулучевых систем, заключающиеся в значительном уменьшении погрешностей из-за продольного и поперечного кренов аппарата, поскольку их влияние практически компенсируется при вычитании доплеровских смещений противоположно направленных лучей. Сохраняется высокая чувствительность к изменению доплеровского смещения при отклонении оси самолета в горизонтальной плоскости, что позволяет найти угол сноса или поперечную составляющую скорости с высокой точностью. Большим достоинством системы также является снижение требований к кратковременной стабильности частоты, поскольку взаимодействующие сигналы каналов приходят примерно с равных расстояний и их временной сдвиг мал. Практически такие же результаты могут быть получены и при использовании в системе трех лучей.
Техническое построение же ДИСС в значительной степени зависит от выбранного режима излучения. В настоящее время применяются системы непрерывного излучения без модуляции или с частотной модуляцией, а также системы с импульсным излучением малой и большой скважности.
Основным достоинством системы непрерывного излучения без модуляции является сосредоточенность спектра отраженного сигнала в пределах одной полосы частот, что обеспечивает наиболее полное использование энергии сигнала, а также сравнительно простое устройство передатчика, приемника и индикатора. Недостаток этой системы – очень высокий уровень модулированного по фазе и амплитуде шума, что ведет к снижению чувствительности приемника.
Для уменьшения влияния шумов используют системы с частотной или импульсной модуляцией. Большее распространение получила частотная модуляция.
Для использования импульсного излучения применяют две разнесенные антенны на одном ЛА. Такой метод утяжеляет и усложняет систему.
Использование ДИСС, особенно в сочетании с такими навигационными приборами, как инерциальная система навигации, датчик воздушной скорости, курсовертикаль, угломерно-дальномерная система ближней навигации, радиосистема дальней навигации, бортовая РЛС, позволяет значительно увеличить надежность и точность управления полетом, поэтому радиоизмеритель скорости стал неотъемлемым элементом пилотажно-навигационных комплексов.
Библиография
1) «Радиотехника». Учебник для ВУЗов.
2) www.college.ru/physics/courses
3) www.5ballov.ru
4) www.referat.ru
5) Осипов М. Л. «Радиотехника», 1995, вып. 3
6) Бункин Б. В. и др. «Письма в ЖТФ»
7) Ван Трис Г. «Теория обнаружения, оценок и модуляции»
8) Тихонов В. И. «Оптимальный прием сигналов»
9) Куликов Е. И., Трифонов А. П. «Оценка параметров сигналов на фоне помех»