Реферат: Многопозиционная фазовая модуляция в системах спутниковой связи с МДЧ
Описание системы
Произведем краткое описание системы.
Чтобы обеспечить связь между различным количеством объектов,
находящихся на большом расстоянии друг от друга часто наибо-
лее целесообразно использовать системы спутниковой связи(CCC).
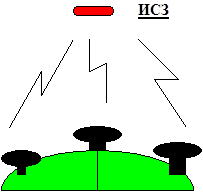
Принцип связи с помощью искусственных спутников Земли(ИСЗ)
заключается в передаче сигналов с одной или нескольких зем-
ных станций (ЗС) на ИСЗ с их последующей ретрансляцией всем
ЗС системы.Устройством,осуществляющем прием сигналов
от передающей(-их) ЗС,их усиление и передачу в направлении
приемной(-ых) ЗС, является бортовой ретранслятор (БРТР) рас-
положенный на ИСЗ.
Понятие МНОГОСТАНЦИОННОГО ДОТУПА.
Ширина полосы частот БРТР ИСЗ составляет окло 400-500 МГц.
Эта полоса делится на 10-12 частотных диапазонов,которые
называются СТВОЛАМИ.В каждом изтаких стволов можно обеспе
чить ретрансляцию десятков и даже сотен сигналов различных
ЗС.Но такая "одновременная" ретрансляция в одном стволе
требует,чтобы сигналам каждой ЗС был присвоен определенный
признак,по которому они будут различаться.Существует нес-
колько таких признаков каждый из которых определяет соотве-
тствующий способ многостанционного доступа (МД). Применяю в основном три вида МД:
- МД С ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (МДЧР)
- МД С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (МДВР)
- МД С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (МДКР)
В соответствии с ТЗ в данной работе рассматривается ССС,ис-
пользующая МДЧР с равномерной расстановкой частот сигналов.
МДЧР предусматривает присвоение сигналам каждой ЗС своей
несущей частоты.Несущие частоты разносятся так,чтобы спек-
тры соответствующих колебаний не перекрывались:
f1 f2 f3 fN
fс - ширина полосы частот сигнала одной ЗС.
fзащ - защитный промежуток между сигналами соседних ЗС.
fств - ширина полосы частот,отведенная данному стволу.
Все космические каналы связи в первом приближении можно рассматривать как каналы гауссовского типа .Это допустимо, поскольку в космических каналах связи можно не считаться с эффектом многолучёвости,а возможные флюктуации сигнала из-за случайных изменений положений антенн ИСЗ на траектории сравнительно невелики и их можно учесть,выбрав соответствующий коэффициент запаса ( см. 3 стр 342 ).
Таким образом имеем линию связи "ИСЗ-Земля" со свободным распространением сигналов и гауссовский канал связи.
2.Выбор показателей качества системы.
Важной задачей является выбор критериев и показателей качества (ПК) системы. ПК -- это параметры ,которые являются определяющими в оценке качества работы системы.ПК может быть только такой внешний варьируемый параметр,который связан с качеством системы строго монотонной зависимостью.Т.о. мы можем принять за ПК колличество земных станций (N) ситемы,ретранслируеммых в одном стволе БРТР.
3.Понятие
уравнения связи.
Опираясь на исходные данные ,можно выразить отношение
сигнала к шуму Qс на входе приёмника как функцию параметров системы.Т.о.
величина Qс имеет отношение к сигналу, пришедшему на вход приёмника.
Задавшись видом сигнала (пусть это будет ФМн сигнал) , можно определить НЕОБХОДИМОЕ отношение сигнал/шум Qтр на входе приёмника ,при котором обеспечивается требуемая скорость передачи информации. Величина Qтр имеет непосредственное отношение к ПРМ.
В реальных условиях необходимо принимаить во внимание влияние межсимвольных искажений,неидеальность синхронизации, нестабильность порогов в решающих устройствах и т.п. По этим причинам величину Qтр необходимо увеличивать и тогда можно функционально связать все параметры системы с помощью условия,называемого УРАВНЕНИЕМ СВЯЗИ: Qс>=Kc*Qтр,где Кс - коэффициент запаса,учитывающий влияние всех этих неблагоприятных факторов.Обычно Кс принимается равным 2--4.(см 1). Выолнение этого уравнения будет означать ,что энергетика линии позволяет обеспечить заданные требования.Определение конкретных значений Qс и Qтр проводится на стадии энергетического расчета линии связи.(см.1 )
4.Энергетический расчет.
В идеальном свободном пространстве отношение средней мощности сигнала на входе ПРМ к средней мощности шума, учитываемой в полосе,занимаемой спектром сигнала,равно:
Pпд *КПА1 *КПА2 *G1*Sэ
Qc ид.=(Pc/Pш)ид.= ------------------------------------ 4*п*r^2*Nо сум*дf'э
здесь: -- Pпд =10 Вт (см.ТЗ)- мощность БРТР
-- G1=Ga/КПД=1000/0.75=1333 -КНД антенны БРТР
(Коэффициент направленного действия определяется отношением коэффициента усиления антенны Ga=30Дб (см.ТЗ) к коэффициенту её полезного действия, который обычно составляет 0.6--0.8.При расчёте положено КПД=0.75(30Дб=1000 )
-- КПА1,КПА2 -- коэффициенты, характеризующие потери в антенных трактах систем, которые зависят от протяжённости антенно-фидерных трактах,которые соединяют антенну с ПРМ в приёмнике и антенну с ПРД в передатчике, наличия разделительных фитльтров в трактах и т.п. Значения КПА1 и КПА2 обычно составляют 0.95--0.4 (см1.стр41).Примем КПА1 и КПА2 равными среднему из этого интервала значению: 0.65
-- Sэ=(КИП*п*D^2)/4 -- эффективная площадь раскрыва антенны ПРМ, где КИП -- коэффициент использования антенны ПРМ.Для реальных параболических антенн КИП составляет 0.5 -- 0.75 (теореоичеки идеальное значение: 0.83) (см.6 стр377), п=3.1415926, D=7м -- диаметр антенны ПРМ ЗС (ТЗ); т.о. Sэ= 23 м^2.
-- r=36000000 м^2 -- протяжённость линии связи (будем считать, что ИСЗ находится на геостационарной орбите, т.к. с точки зрения экономичности устройств антенных систем -- это выгодно, правда призводить запуск на геостационарную орбиту -- дороже, нежели на эллиптическую (см.1 стр18)).
-- Nо сум =(1.38*10^(-23))*Тш -- суммарная спектральная плотность шума на входе ПРМ , где Тш -- результирующая шумовая температура на входе ПРМ, Тш=Тк+ Тат+Тз+Тша+Тв+Тш пр /КПМВ, где КПМВ -- коэффициент передачи мощности волноводного тракта (КПМВ обычно составляет 0.75) Тв=То*(1-КПМВ/КПМВ)=91 К --шумовая температура (ш.т.) волноводного тракта; ----Тш пр -- ш.т. ПРМ (в таблице Тш пр обозначено как Тш ср, равная средней температуре из приведённых в таблице интервалов ш.т. для различных типов усилителей см. ниже); Тк -- ш.т. космоса, Тз= 2.9 -- ш.т. Земли ( при условии,что мощность боковых лепестков ДН ПРМ ЗС в 100 раз меньше главного) Тат -- ш.т. атмосферы (70 -- 150 К), Тша -- ш.т. антенны. Примем, что Тк+Тат+Тз+Тша =100 К, тогда при меняющемся типе усилителя будем иметь разные Тш, а следовательно и разные значения сигнал/шум.
-- дfэ -- эквивалентная шумовая полоса ПРМ ЗС , которая определяется шириной спектра сигнала. Т.к. скорость передачи информации при многопозиционном сигнале ( М положений фазы, при рассмотрении ФМн сигналов) R=(log(M))/t, где t -- длительность элементарной посылки, и т.к. ширина спектра сигналов одного канала дfс=1/t, то ширина спектра сигналов всей станции дfст, равная дfэ=(R/log (M))*N, где N=50 -- колличество телефонных каналов на одной ЗС, R= 64 Кбит/с -- стандартная скорость передачи цифрового сообщения. Величина М в таблице (см. ниже) изменяет.
В реальных условиях фактическое отношение сигнала к шуму на входе ПРМ уменьшается по сравнению с идеальным в связи с :
-- потерями мощности Lа за счёт неточного
наведения антенн ПРД и ПРМ; обычно значение Lа лежит в интервале 0.9 -- 0.8 (от -0.5 до -1 дБ) .Пусть Lа= 0.8 (см.1 стр 41)
--потерями Lальфа за счёт поглощения и рассеивание энергии сигнала из-за неидеальности свойств среды (осадки,туман,угол места антенны,рабочая частота . . .); Значение Lальфа принадлежит интервалу 0.8 -- 0.5 ,что составляет около -1 -- -3 дБ .Пусть Lальфа=0.6
-- потерями поляризации Lп, возникающими из-за несоответствия поляризаций антенн ПРД и ПРМ. Lп составляет от -0.5 до -3 дБ,что соответствует 0.5--0.9.
Т.о. фактическое отношение сигнала к шуму Qc факт. будет в Lа*Lалфа*Lп=0.8*0.6*0.6=0.288 раз меньше (см.табл.).
Определим Qтр -- требуемое, для удовлетворения заданной точности приёма (Рош), отношение сигнала к шуму, которое должно быть на входе ПРМ. При этом рассматриваются М-ичные ФМн сигналы:
-- для двоичных сигналов выражение для Qтр имеет вид:
Qтр=2*ln(1/2*Рош)/Бс*(1-Рs)
-- для М-ичных сигналов :
Qтр=(ln((M-1)/M*Рош))/sin^2(п/М), (Бс=1),
где Бс=t*дfc -- база сигнала (для ФМн сигналов Бс=1), t -- длительность посылки сигнала (длительность информационного символа),дfс -- ширина спектра сигнала, Рош=0.00001 -- заданная в ТЗ вероятность ошибки при приёме сигнала.
В реальных условиях необходимо принимать во внимание влияние межсимвольных искажений,неидеальность синхронизации, нестабильность порогов в решающих устройствах и т.п. Поэтому величину Qтр необходимо увеличивать в Кс ( 2--4) раз и для успешного приема необходимо выполнение соотношения:
Qc>=Kc*Qтр
Результаты расчёта по формулам для Q c ид,Qc факт,Qтр, а также проверка выполнения вышеуказанного условия приведены в следующей таблице:
Из представленной таблицы видно, что в данной системе из энергетических соображений можно использовать ФМн-сигналы с М равным 2,4 и частично 8.
4. Расчет показателя качества системы
Показателем качества данной системы является колличесво земных станций, ретранслируемых в одном стволе БРТР (N).
В общем случае N=Dfствола/Dfстанции, где
--Dfствола -- полоса частот, отведенная для одного ствола. дfствола=70 МГц (см.ТЗ.)
-- Dfстанции -- ширина спектра сигнала одной ЗС, ретранслируемой в данном стволе. Dfстанции=Dfс*Nк, (Nк=50 -- число телефонных каналов на одной ЗС (см.ТЗ.), дfс -- ширина спектра сигналов одного канала). Т.к. Dfс=R/log M (где R=64 кбит/с), то Dfстанции=Nк* *(R/log M)=64000*50/log M.(здесь,ранее и далее log имеет основание 2, исключая случаи, где оно не оговорено отдельно).
Далее приведена таблица расчета значений N в зависимости от различных М :
| Кратность ФМ-сигнала | Dfстанции, кГц | N |
| 2 | 3200 | 21.875 |
| 4 | 1600 | 43.75 |
| 8 | 1066.667 | 65.625 |
В стремлении достичь максимума показателя качества N, естественно выбрать сигнал ФМн с М=8 (N=65).
5. О построении ФМ и АФМ сигналов.
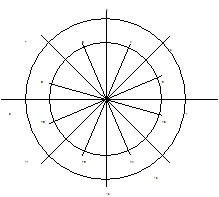
В основу принципов построения ФМ сигналов заложено формальное расположение m сигнальных точек на окружности с радиусом R, зависящем от мощности (энергии посылки) сигнала,на равных расстояниях с угловым интервалом 2*p/m радиан. Примеры совокупностей сигнальных точек-векторов для случаев m=2,4,8,16:
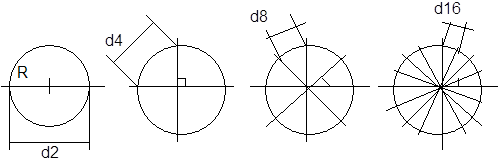
 а) б) в) г)
а) б) в) г)
Если на посылке передается гармоническое колебание с параметрами a,w,j, тогда
____________________
T
__ ó __ __
R=\/E= ôa^2*sin^2(w*t+j)dt =a*\/ T/ \/ 2
õ
0
Данное значение R совпадает с евклидовым расстоянием между центром окружности и любой точкой на ней. Для 2-х позиционного ФМ сигнала (рис. а) расстояние между сигланьными точками 2*\/E - это максимально возможное расстояние между точками круга с радиусом \/E. Оно полностью определяет потенциальную помехоустойчивость данной 2-х позиционной системы.
Расстояние между двумя гармоническими сигналами S1 и S2 длительностью Т1 отличающимися по фазе на угол j
d=(S1,S2)= (S1(t)-S2(t))^2dt = (a*sin(w*t+j)-a*sinw*t)^2dt =
______________ ____ _______
=\/ (a^2)*T(1-cosj) =\/2*E *\/1-cosj ,где E=(a^2)*T/2
Ниже приведена таблица расчетов рассояний dm между ближайшими вариантами сигнала в m-позиционных системах с ФМ и соответствующих проигрышей (по минимальному сигнальному расстоянию), текущей системы двухпозиционной (см. 7 стр 49.):
| Кратность манипуляции К | Число фаз m | Минимальная разнсть фаз | Минимальное евклидово расстояние между сигналами dm | d2/dm,дБ |
| 1 | 2 | p | 2*\/E | 0 |
| 2 | 4 | p/2 | \/2*E=1.41*\/E | 3.01 |
| 3 | 8 | p/4 | \/(2-\/2)E=0.765\/E | 8.34 |
| 4 | 16 | p/8 |
\/(2--\/2+\/2)E= =0.39\/E |
14.2 |
| 5 | 32 | p/16 |
\/(2--\/2+\/2+\/2)E= =0.196\/E |
20.2 |
Равномерное размещение всех сигнальных точек на окружности, т.е. использование равномощных сигналов, отличающихся лишь фазой, является оптимальным только для 2-х, 3-х и 4-х позиционных случаев. При m>4 оптимальными будут неравномощные сигналы, которые кроме отличия по фазе имеют различие по амплитуде. Размещены они равномерно, обычно внутри окружности, радиус которой определяется максимально допустимой энергией сигнала. С точки зрения теории модуляции такие сигналы относятся к сигналам с комбинированной модуляцией, при которой одновременнo изменяется несколько параметров сигнала. В данном случае амплитуда и фаза (сигналы с амплитудно-фазовой манипуляцией АФМн). Простейший принцип построения сигналов с АФМн состоит в том, что сигнальные точки размещаются на двух концентрических окружностях. Однако, этот путь не всегда приводит к оптимальному результату. Например: 8-ми позиционный сигнал с АФМн:
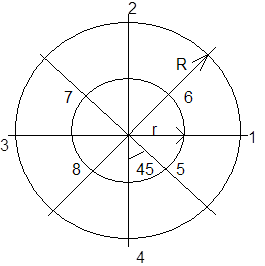
___
4
сигнала размещены на окружности с радиусом R=\/E , а 4 на окружности r<R
со сдвигом по фазе p/4 (сигнальные точки расположены рядом с их
соответствующими номерами). Данная совокупность сигналов оптимизируется по
критерию максимума минимального расстояния между сигналами, путём выбора
отношения радиусов R и r. Оптимальное отношение R/r=1.932 определяется чисто из
геометрических соображений: чем больше r, тем больше расстояние между
сигнальными точками окружности радиуса r, но тем меньше расстояния между этими
точками и токами окружности радиуса R. Пэтому искомый максимум R/r достигается
тогда, когда эти расстояния будут равны т.е. равносторонним будет треугольник
854, а это будет только тогда, когда искомое отношение равно указанному. При
этом оптимальном отношении минимальное расстояние между сигналами d8=0.73\/E
(см.7.стр.51). Это расстояние меньше,чем у системы 8-ми позиционных
ФМн-сигналов, расположенных на одной окружности радиуса R(см. последнюю
таблицу). Таким образом, в случае трехкратной системы размещение сигнальных
векторов на двух концентрических окружностях не дает выигрыша. Оптимальным по
критерию максимума минимального расстояния оказывается простейшая 8-ми
позиционная система с АФМн, у которой 7 сигнальных точек размещены на
окружности радиуса R=\/E, а восьмой сигнал равен нулю:
МИНИМАЛЬНОЕ РАССТОЯНИЕ У ТАКОЙ СИСТЕМЫ d8=0.86\/E, ЧТО БОЛЬШЕ, ЧЕМ d8 ФМн.
Далее рассмотрим 16-позиционные АФМн-сигналы.
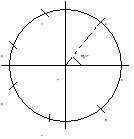
Расстояние между ближайшими сигнальными точками в 16-ти позиционной ФМн системе d16=0.39\/E, что соответствует проигрышу в 14.2 дБ по сравнению с 2-х позиционной (см. посл. табл.). В круге данного радиуса можно построить лучшую систему сигналов с АФМн. Примером построения такой системы является система, у которой нечётные сигналы равномерно размещены на окружности большого радиуса с интервалом p/4, а чётные -- с тем же интервалом на окружности меньшего радиуса, но с общим сдвигом по фазе относительно нечётных на угол p/8:
Оптимальное соотношение между радиусами R/r=1.587. При этом отношении минимальное расстояние между сигналами d16=0.482\/E. Таким образом минимальное расстояние между сигналами в 16-ти позиционной АФМн сигнале больше, чем в аналогичной ФМн. Следовательно и помехоустойчивость в 16-типозиционной АФМн системе выше при таком расположении векторов, чем в аналогичной ФМн системе, при равномерном размещении сигнальных точек на окружности.
Другим ярким примером 16-ти позиционных АФМн сигналов является система, в которой сикнальные точки размещены в узлах квадратной решетки:
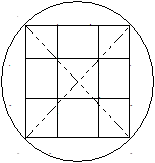
Минимальное расстояние между сигнальными точками (d16=0.47\/E) хоть и меньше, чем в предыдущем примере, но такой сигнал удобен с точки зрения практической реализации.
При всех своих достоинствах АФМн сигналы имеют довольно серьёзный недостаток -- это неравномощность вариантов. По этой причине возникают определённые трудности как при их передачи(особенно при наличии нелинейных преобразований, которые обычно имеют место, например на БРТР), так и при оптимальной обработке. По этим причинам в рассматриваемой здесь системе не будем переходить от 8-ми позиционных ФМн сигналов к аналогичным АФМн (хотя необходимо отметить относительно весомое превосходство последних по помехоустойчивости). Однако, в том случае, если необходимо в одном БРТР ретранслировать число станций большее, чем 65 (при Pош=const), то придётся сделать переход к сигналам с шестнадцатью позициями фазы, т.к. при возрастании m в сигналах с ФМн, при равномерном расположении сигнальных точек на окружнсти, резко ухудшается помехоустйчивость. 8-ми позиционные сигналы АФМн довольно часто нахoдят применение именно по этой причине.
6. Приемник земной станции.
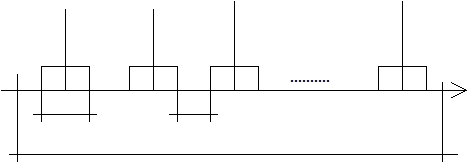
В общем случае спектр сообщения на входе приемника ЗС выглядит следующим образом:

Требуется выделить сигналы от каждой станции,следовательно необходим блок полосовых фильтров:

Упрощенная структурная схема приемника ЗС:
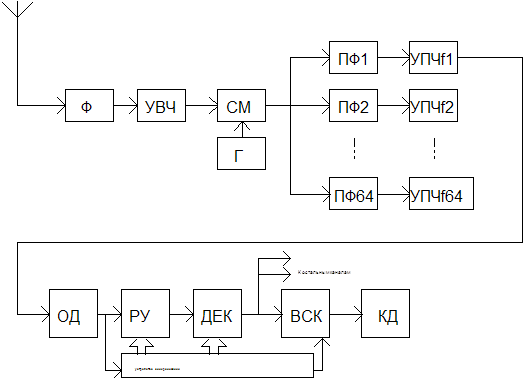
Обозначения на схеме: Ф-высокочастотный фильтр, УВЧ- усилитель высокой частоты (параметрический, ЛБВ и т.д.), СМ - смеситель (преобразователь частоты; в зависимости от ширины спектра сигнала и несущей частоты возможно одно, два или даже три преобразования частоты; ограничимся в данном приемнике одним ПЧ, если же полученной при этом избирательности по зеркальному каналу в общем тракте окажется недостаточно, придется переходить на 2-х кратное ПЧ и т.д.); Г- гетеродин; ПФ - полосовые фильтры; т.к. от них требуется высокая крутизна АЧХ, то обычно в качестве ПФ используются фильтры Чебышева или Баттерворта высокого порядка; УПЧ - усилители промежуточной частоты: в них осуществляется основное усиление, полоса пропускания УПЧ Dfупч=Dfстанции+dfнест, гдеdfнест=0.00001--0.000001 - запас на нестабильность частоты.Пустьdfнест=0.00001, тогда dfнест=0.00001*fo =0.00001*11 Ггц; ОД- общий демодулятор, РУ - решающее устройство; ВСК - временной селекторный каскад (в нем происходит разделение каналов); КД - канальные демодуляторы, выделяющие сообщение; Дек. - ЦАП.
Рассмотрим работу некоторых узлов приемника более подробно.
1) Общий демодулятор.
На интервале длительностью Т из совокупности известных равномощных сигналов S1(t), S2(t), ..., Sm(t) (в данном случае m=8) переданным считается сигнал Si (t), если
ó ó
ôx(t)*Si(t)dt>ôx(t)*Sj(t)dt
õ õ
j=1,2,...m. i не равно j
где х(t) - принятый сигнал (1)
Так как принимаемый сигнал - ФМ, то входящие в (1) опорные сигналы Sj представляют собой гармонические колебания с соответствующими начальными фазами Sj= sin (wt + jj); j=1,2,...,m.
Общая схема когерентного демодулятора с ФМ m=8 [7,стр.95]
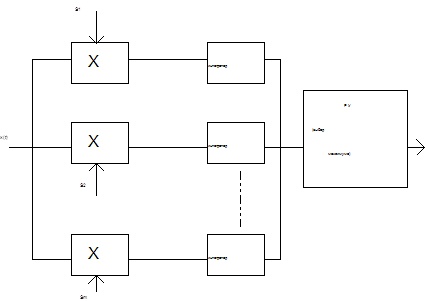
Схема содержит m=8 корреляторов и решающее устройство сравнения и выбора максимального из выходов корреляторов. Вопросы реального формирования опорных колебаний описаны в (7)Число опорных колебанийи соответственно корреляторов в демодуляторе сигналов с ФМ меньше, чем число вариантов фазы. Число опор многопозиционных ФМ сигналов может быть сведено к двум, если применить соответствующий вычислитель.
Пусть имеются свертки принятого сигнала x(t) и квадратурных опорных колебаний с произвольной начальной фазой jо, т.е.
ó
Xo=ôx(t)*sin(wt+jo)
õ
(2)
ó
Xo=ôx(t)*cos(wt+jо)
õ
Тогда любой из интервалов: входящих в алгоритм (1), можно представить через (2) по формуле:
Vi=Xo*cos(jj-jo) +Yo*sin(jj-jo) (3),
следовательно общая схема когерентного демодулятора сигналов с многопозиционной ФМн может быть представлена в следующем виде:
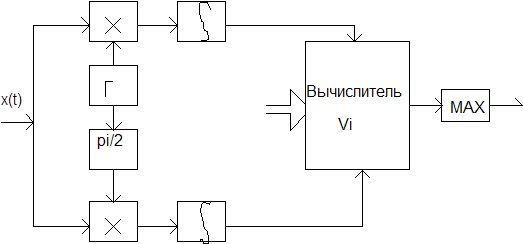
В этой схеме автономный генератор и фазовращатель на p/2 вырабатывают квадратурные опорные колебания с произвольной начальной фазой jо; в 2-х корреляторах вычисляются проекции принятого сигнала на эти опорные колебания, в вычислителе по формуле (3) вычисляются значения Vj, а затем определяется максимальное из них. Для работы схемы необходимы точные значения разностей jj-jo между фазами вариантов принимаеиого сигнала и фазой опорного колебания в корреляторах. Эти разности фаз после их нахождения вводятся в вычислитель.
Подробные сведения о работе демодуляторов сигналов с много позиционной ФМ можно найти в [7].
2) Система синхронизации
В системе синхронизации есть подсистемы:
а) подсистема тактовой синхронизации;
б) подсистема, обслуживающая декодер (ЦАП);
в) подсистема, управляющая разделением каналов.
7. Учет недостатков МДЧР при равномерной расстановке частот сигналов.
При МДЧР вследствие одновременного воздействия многих сигналов на нелинейный выходной усилитель мощности ствола ретранслятора, возникает ряд нежелательных эффектов: снижается общая полезная мощность на выходе УМ; появляются интермодуляционные искажения из-за нелинейности амплитудной характеристики УМ, происходит взаимное подавление сигналов. Эти недостатки приводят к снижению пропускной способности систем, под которой понимаем число станций (сигналов), обслуживаемых одним стволом БРТР.
Сигнал, занимающий среднее положение в полосе частот ствола, при равномерном распределении мощностей сигналов находится в наихудшем положении, так как на него приходится наибольший уровень интермодуляционных искажений Если необходимо выровнять помехоустойчивость приемников различных станций, то распределение мощностей сигналов должно быть принято неравномерным.
8. Заключение
В курсовом проекте дано краткое описание спутниковой системы связи с МДЧР с равномерной расстановкой частот сигналов; достаточно подробно выполнен раздел, посвященный выбору сигнала и перспективам применения в данной системе сигналов с АФМ; менее подробно рассмотрены вопросы приема выбранного сигнала . Более полные сведения о тех или иных разделах данной работы можно получить из соответствующих первоисточников, которые указаны по тексту.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ККК.
1. Тип системы : ССС с МДЧР
2. Число телефонных каналов на данной земной станции (ЗС) - 50.
3. Средняя частота работы ретранслятора (РТР)
fo =11 ГГц
4. Вероятность ошибки на 1 символ:
Рош=10^(-5)
5. Коэффициент усиления антенны бортового РТР
Ga прд =30 дБ
6. Диаметр антенны приемника ЗС
Da прм=7 м
7. Ширина полосы частот, отводимая стволу Df ств=70 Мгц
8. Мощность бортового ПРД
Р прд=10 Вт
ЛИТЕРАТУРА
1."Проектирование систем передачи цифровой информации." под ред. Пенена П.И.
2."Проектирование многоканальных систем передачи информации" Когновицкий Л.В.
3."Основы технического проектирования систем связи через ИСЗ". Фортушенко А.Д. и др.
4." Справочник Спутниковая связь и вещание." под ред. Кантора Л.Я., 1988г.
5."Системы передачи цифровой информации".Пенин П.И.
6."Антенны и устрйства СВЧ". Сазонов Д.М.
7."Цифровая переадача информации фазомодулированными сигналами". Окунев Ю.Б.
8."Помехоустойчивость и эффективность СПИ" под ред, Зюко А.Г.
9."Оптимизация по пропускной способности сисем связи с частотным разделением". Когновицкий Л.В. Касымов Ш.И. Мельников Б.С.
КУРСОВОЙ ПРОЕКТ
ПО КУРСУ
СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ
НА ТЕМУ
"МНОГОСТАНЦИОННЫЙ ДОСТУП С
ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ."
ФАКУЛЬТЕТ РТФ
ГРУППА Р-8-91
СТУДЕНТ АСАТРЯН С.Р.
РУКОВОДИТЕЛЬ КОГНОВИЦКИЙ Л.В