Реферат: Анализ качества дискретных систем управления
Реферат
Предмет: Теория автоматического управления
Тема: Анализ качества дискретных систем управления
Методы определения качества дискретных систем автоматического управления аналогичны методам определения качества непрерывных систем с учетом некоторых особенностей.
1. Оценка качества дискретной системы по переходной функции
Порядок использования этого метода рассмотрим на примере.
Пример 1. Рассчитать переходный процесс в заданной дискретной системе (рис. 1), и определить качество переходного процесса при различных значениях T и kv .
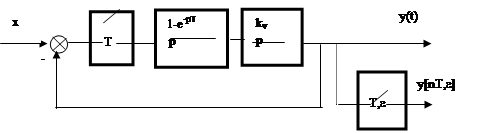
Рис. 1
Решение: Выходной дискретный сигнал равен
![]()
Если x(t) = 1(t),
то  .
.
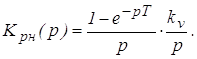
Определим передаточную функцию разомкнутой непрерывной части
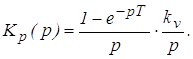
Выполним дискретное преобразование

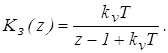
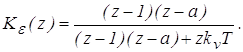
Передаточная функция замкнутой дискретной системы
Подставим x(z) и Kз(z,e) в выражение для выходного дискретного сигнала
При этом
 .
.
Определим значения полюсов - zk их число -n и кратность -m.
z1 = 1, z2 = 1 - kvT = A, n = 2, m = 1.
Выражение для переходной функции имеет вид:
Определим установившееся значение переходной функции:

Рассчитаем переходную функцию для различных значений параметров системы
1. Пусть kvT = 1.

Переходный процесс приведен на рис. 2а. При этом система имеет следующие показатели качества: время регулирования tp = T; относительное перерегулирование s% = 0; число переколебаний N = 0; период собственных колебаний T0 = T.
2. Пусть kvT = 2.

Переходный процесс приведен на рис. 2б. При этом система находится на границе устойчивости.
3. Пусть kvT = 1,5.
![]()
Результаты расчета приведены в таблице 1.
Таблица 1
| n | 0 | 1 | 2 | 3 | 4 | 5 |
|
(-0,5)n |
1 | -0,5 | 0,25 | -0,125 | 0,0625 | -0,03125 |
| h[nT] | 0 | 1,5 | 0,75 | 1,125 | 0,9375 | 1,03125 |
Переходный процесс приведен на рис. 2в.
При этом система имеет следующие показатели качества:
tp = (4¸5)T; s% = 50; N = 4; T0 = 2T.
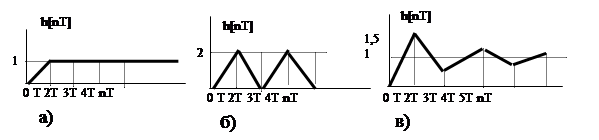
Рис. 2
2. Корневые методы анализа качества
Корневые методы позволяют оценить качество с помощью косвенных показателей качества, при этом анализируется расположение корней характеристического уравнения ki = ±si ±jwi в комплексной плоскости в пределах основной полосы.
При этом используются следующие косвенные показатели качества:
1.
Степень
устойчивости ![]() .
.
2. Колебательность m = w0/s0.
Демпфирование c = s0/w0.
3. Интегральные методы анализа качества
Линейная интегральная оценка
Площадь регулирования может быть определена с помощью суммы ряда
 . (1)
. (1)
По аналогии с непрерывными системами сумму ряда (1) можно вычислить по формуле
 (2)
(2)
Пример 2. Вычислить величину J1 для заданной системы (рис. 3).
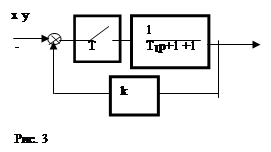
Решение: Определим y(z)


Определим y¥
![]()
![]()
Определим величину интеграла J1

Интегральная квадратичная оценка
Интегральная квадратичная оценка пригодна для любых переходных процессов, и вычисляется по формуле
 . (3)
. (3)
В соответствии с дуальной теоремой для дискретных оригиналов, можно записать следующую формулу для расчета квадратичной интегральной оценки
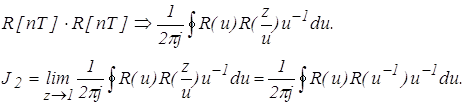 (4)
(4)
Этот интеграл можно вычислить либо с помощью вычетов по полюсам подынтегральной функции, либо с использованием табулированных значений интеграла (см. табл. 2) для функции
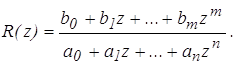
Таблица 2
| n | R(z) |
J2 |
| 1 |
|
|
| 2 |
|
|
Пример 7. Вычислить величину J2 для заданной системы (рис. 4).
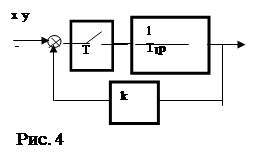
Решение:
1. Определим значение выходной величины y(z)

2. Определим установившееся значение выходной величины y¥
![]()

3. Определим R(z)
 ,
,
где d=T1 /(T1 +k).
4. Определим величину интеграла J2 с помощью вычетов z1 = d
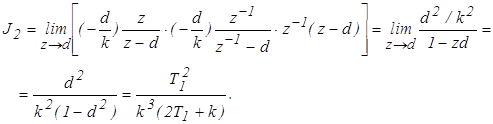
![]()
5. Определим величину интеграла J2 с помощью таблиц

4. Точность дискретных систем управления
Точность дискретных САУ оценивается аналогично, как и непрерывных, с учетом некоторых особенностей.
Изображение ошибки для дискретной системы равно
![]() (5)
(5)
Установившееся значение ошибки определяется с помощью теоремы о конечном значении дискретной функции
![]() (6)
(6)
При определении ошибок используют типовые воздействия, дискретные преобразования Лапласа для типовых воздействий имеют вид:
-для воздействия с постоянной амплитудой
 (7)
(7)
-для воздействия с постоянной скоростью
 (8)
(8)
-для воздействия с постоянным ускорением
 (9)
(9)
Рассмотрим ошибки в дискретных системах. Ошибки в системах управления можно классифицировать как статические, кинетические и инерционные.
Статическая ошибка – это ошибка, возникающая в системе при отработке единичного воздействия.
 (10)
(10)
Кинетическая ошибка – это ошибка, возникающая в системе при отработке линейно – возрастающего воздействия.
 (11)
(11)
Инерционная ошибка – это ошибка, возникающая в системе при отработке квадратичного воздействия.
![]()
Рассмотрим примеры расчета установившихся ошибок в дискретных системах.
Пример 1. Для заданной системы (рис. 5) определить установившиеся ошибки.
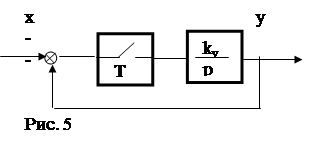
Решение: Определим выражения для установившихся ошибок.
1. Статическая ошибка

2. Кинетическая ошибка

3. Инерционная ошибка

Пример 2. Для заданной системы (рис. 6) определить установившиеся ошибки.
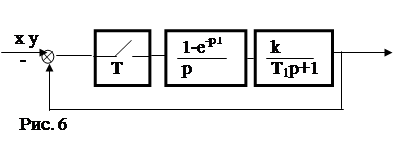
Решение:
1. Определим передаточную функцию разомкнутой системы
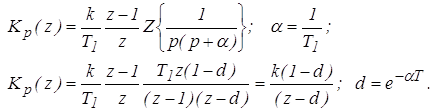
2. Определим передаточную функцию системы по ошибке
3. Определим статическую ошибку

4. Определим кинетическую ошибку

Пример 3. Для заданной системы (рис. 7) рассчитать установившиеся ошибки, если алгоритм функционирования цифровой части описывается уравнением:
 x y
x y
Рис. 7
Решение: Исходную схему можно представить в виде (рис. 8).
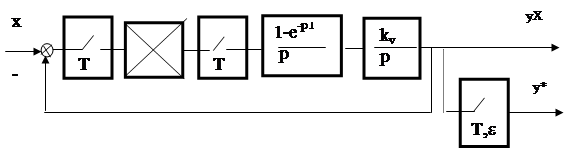
Рис. 8
Выполним дискретное преобразование

2. Определим передаточную функцию цифрового автомата в соответствии с алгоритмом его функционирования
![]()
3. Определим передаточную функцию разомкнутой дискретной системы
![]()
4. Определим передаточную функцию системы по ошибке
5. Определим статическую ошибку

6. Определим кинетическую ошибку

Литература
1. Теория автоматического управления: Учебник для вузов. Ч1/Под ред. А.А. Воронова- М.: Высш. Шк.,1986.-367 с.
2. Теория автоматического управления: Учебник для вузов. Ч2/Под ред. А.А. Воронова- М.: Высш. Шк.,1986. -504 с.
3. Вероятностные методы в вычислительной технике. Под ред. А.Н. Лебедева и Е.А. Чернявского - М.: Высш. Шк.,1986. -312 с.
4. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. -712 с.
5. Васильев В.Г. Теорія сигналів і систем: Навч. посібник. – К.: ІСДО, 1995. –68 с.
6. Бойко Н.П., Стеклов В.К. Системы автоматического управления на базе микро-ЭВМ.- К.: Тэхника,1989. –182 с.
7. Автоматизированное проектирование систем автоматического управления./Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
| Психологический словарь | |
|
Борис Гурьевич Мещеряков, Владимир Петрович Зинченко Большой психологический словарь Оглавление Предисловие Персоналии Список авторов Список ... МЕТОД СРЕДНЕЙ ОШИБКИ (англ. method of average error) - метод классической психофизики, в котором испытуемый сам устанавливает требуемую инструкцией величину стимула (напр., "стимул ... Средняя арифметическая этих ошибок, вычисленная для всей серии проб, рассматривается как величина, субъективно соответствующая эталону. |
Раздел: Рефераты по психологии Тип: книга |
| Линейные автоматические системы регулирования | |
|
РОСАТОМ СЕВЕРСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ Кафедра Э и АФУ ЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ КУРСОВОЙ ПРОЕКТ ПОЯСНИТЕЛЬНАЯ ... 1) Статическая ошибка (имеет место только в П - регуляторе) - это отклонение регулируемого параметра от заданного в установившемся режиме (точность системы); . Если в числителе передаточной функции системы нет свободного члена, то статическая ошибка равна нулю; |
Раздел: Рефераты по экономике Тип: курсовая работа |
| Система управления узлом дегидрирования этилбензола | |
|
СОДЕРЖАНИЕ Введение 1. Характеристика объекта автоматизации 1.1 Описание технологического процесса 1.2 Основные характеристики и особенности ... Расчётная схема состоит из дискретного регулятора W* и дискретного объекта с передаточной функцией W*пнч(р), а все сигналы представляются синхронной последовательностью ... Статическая ошибка регулирования при исследовании ПИД-регулятора равна нулю. |
Раздел: Промышленность, производство Тип: дипломная работа |
| Математические основы теории систем | |
|
ОГЛАВЛЕНИЕ Оглавление 1 Введение 3 Объект и устройство 3 Задачи управления 4 Матричный формализм в теории систем 6 Линейные операторы 6 Инвариантное ... По этой причине будем называть H(Z) дискретной передаточной функцией или передаточной функцией, Z-функцией. Качественное описание характеристики звена с выходными сигналами U1,...,Um должна пониматься характеристика передачи в установившемся режиме, которая описывается статическим ... |
Раздел: Рефераты по математике Тип: реферат |
| Основы проектирования и конструирования | |
|
Основы проектирования и конструирования Конспект лекций для студентов специальности 060800 "Экономика и управление на предприятии" Составитель ... Первый интеграл называется статическим моментом сечения относительно оси х, второй - относительно оси у. При параллельном переносе осей статический момент меняется на величину ... Сравнение (6.12) с (6.4) и (6.5) позволяет установить, что левая и правая части неравенства (6.12) представляют собой относительные уступки l2 и l1, вычисленные по методу ... |
Раздел: Промышленность, производство Тип: учебное пособие |