Курсовая работа: Загальна характеристика датчиків
Курсова робота
Загальна характеристика датчиків
2008
1. Визначення та класифікація датчиків
Датчиками називаються електронні прилади, які перетворюють параметр зовнішнього середовища у напругу, або струм, значення яких пов’язане з параметром зовнішнього середовища.
Класифікація датчиків можлива за двома ознаками:
1. По тому параметру зовнішнього середовища, яке перетворюється у напругу або струм. Відрізняють датчики тиску (А), сили (Б), положення (по координаті або по куту) (В), переміщення (по координаті або по куту) (Г), швидкості (лінійної або кутової) (Д), прискорення (лінійного або кутового) (Е), вібрації (Ж), близькості (З), температури (І), газового складу середовища (К), оборотів (Л), деформації (М), вологості (Н) тощо.
По тому фізичному принципу, за яким діє датчик. Відрізняють датчики ємнісні (ДА), п’єзоелектричні (ДБ), диференційно-трансформаторні (ДВ), термопарні (ДГ), тензорезистивні (ДД), потенціометричні (ДЕ), струмовіхрові (ДЖ), термісторні (ДІ), на ефекті Хола (ДК), п’єзорезистивні (ДЛ), оптоволоконні (ДМ), магніторезистивні (ДН), на поверхових акустичних хвилях (ДО), індукційні (ДП), на ефекті Віларі (ДР) тощо.
Датчик, що працює на будь-якому фізичному принципі може працювати як датчик різних параметрів зовнішнього середовища. У табл.1 наведені сучасні дані по використанню датчиків різних типів (знаком Х позначається переважне використання, знаком О – можливе використання, якщо знаку немає, то не використовується). До речі, багатьох типів датчиків, які розглядаються нижче, в таблиці нема.
Таблиця 1. Використання датчиків різних типів для перетворення різних параметрів зовнішнього середовища у електричний сигнал
| А | Б | В | Г | Д | Е | Ж | З | І | К | Л | М | Н | |
| ДА | Х | Х | О | Х | Х | О | Х | О | О | О | О | ||
| ДБ | О | О | О | Х | |||||||||
| ДВ | О | О | О | Х | О | О | О | Х | |||||
| ДГ | О | ||||||||||||
| ДД | Х | Х | О | О | |||||||||
| ДЕ | О | О | Х | О | |||||||||
| ДЖ | О | О | О | О | Х | О | |||||||
| ДІ | О | ||||||||||||
| ДК | О | Х | О | Х | Х | ||||||||
| ДЛ | Х | Х | Х | Х | О | О | О | ||||||
| ДМ | О | О | О | Х | О | Х | Х | Х | О | О | О | О | О |
| ДН | О | О | Х | О | |||||||||
| ДО | О | О | О | О | О | ||||||||
| ДП | Х | О | Х | ||||||||||
| ДР | О | О | О | Х | Х |
Датчики механічних величин
Датчики положення або близькості
У якості таких датчиків можуть використовуватись датчики, побудовані на різних фізичних ефектах. У табл.2 наведене порівняння характеристик цих датчиків по різних параметрах.
Таблиця Порівняння характеристик датчиків положення або близкості
| Тип датчика | Індуктивний або диференційно-трансформаторний | Ємнісний | Ультразвуковий | Фотоелектричний |
| Параметр | ||||
| Відстань спрацювання | 100 мм | 50 мм | 12 м | 100-200 м |
| Максимальна температура середовища | 250°С | 70°С | 70°С | 300°С (з використанням світловодів |
| Максимальна частота спрацювання | 5 кГц | 10 Гц | 50 Гц | 1,5 кГц |
| Стійкість до зовнішнього впливу | Висока | Низька, чутливий до вологості та забруднення | Середня, чутливий до температури, тиску | Середня, чутливий до забруднення, конденсату |
Щодо простоти та стійкості до зовнішнього впливу найбільш привабливі індуктивні датчики. В найпростішому випадку індуктивний датчик складається з котушки з обмоткою, осердя з магнітом’якого заліза та магніта (рис.1).
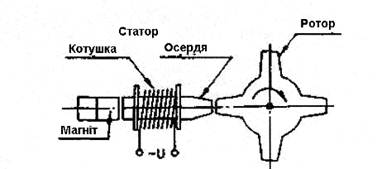
Рис.1. Конструкція індуктивного датчика
Ці три елементи складають статор датчика. Зі статором взаємодіє ротор у вигляді зубчатого диску або рейки з відповідною кількістю зубців. Коли один з зубців ротора наближається до обмотки, напруга у ній швидко наростає та при збіганні з середньою лінією обмотки, досягає максимуму, а потім при віддаленні зубця швидко міняє знак та збільшується у протилежному напрямку до максимуму. На графіку рис.2 виразно видна велика крутизна зміну напруги, тому цей перехід може бути використаний для керування електронними системами.
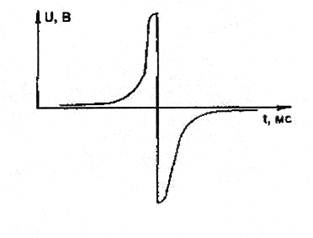
Рис. Вихідний сигнал індуктивного датчика.
Така конструкція датчика може використовуватись для підрахування кількості обертів валу двигуна, або іншого обертаючого приладу.
Коли потрібно реагувати на близькість сталевої (або взагалі металічної) деталі використовується індуктивний датчик, схема якого показана на рис.3.
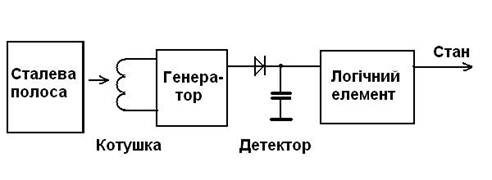
Рис.3. Індуктивний датчик, що реагує на близькість металевої деталі
Генератор, у склад якого входить котушка без осердя, побудований таким чином, що він не працює взагалі, якщо поблизу котушки нема металічного предмету. Тому на виході генератора напруга дорівнює нулю і на виході детектора теж. Якщо металічний предмет наближається до котушки, генератор починає генерувати високочастотні коливання, на виході детектору з’являється напруга і логічний елемент замість лог.”0” генерує на виході сигнал лог.”1”, сповіщаючи про наближення металевого предмету.
Такі датчики використовуються як пристрої, що сповіщають про закриття металевих дверей, люків, різних заслінок та кришок. Наприклад, на літаку „Boeing-747” налічується до 200 таких датчиків, виходи яких підключені до комп’ютера. Програма комп’ютера передбачає які саме двері та люки повинні бути закриті при злеті, при нормальному польоті, при посадці. Якщо є якісь відхилення, програма сповістить пілотів, або, наприклад, заборонить злет. Головним виробником таких датчиків є американська фірма Honeywell. Схожі характеристики мають датчики Хола. Американський вчений Герберт Едвін Хол у 1879 р. відкрив фізичний ефект, який пояснюється на рис.4.
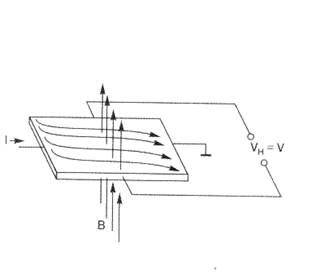
Рис.4. Фізичне трактування ефекту Хола
Якщо через пластину пропустити струм І та поперек цієї пластини пропустити магнітне поле з індукцією В, то на поперечних гранях пластини з’явиться напруга
Vн = RBIsinj/d,
де R – коефіцієнт Хола, який залежить від матеріалу пластини, В – магнітна індукція, І – струм, j - кут нахилу магнітної індукції до струму (він дорівнює 90°, якщо індукція поперечна до струму), d – товщина пластини.
Зараз знайдені матеріали, які мають досить великий коефіцієнт Хола. Датчик Хола можна також використати у ситуації рис.1 як пристрій для підрахування кількості обертів. Датчики Хола, що їх виготовляє компанія Honeywell поділяються на лінійні та цифрові. На рис.5 показана залежність вихідного сигналу від прикладеної до датчика напруги та магнітної індукції.
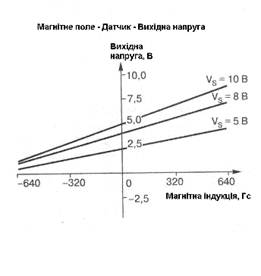
Рис.5. Залежність вихідного сигналу від прикладеної до датчика напруги та магнітної індукції.
Лінійні датчики можна використовувати для вимірювання відстані, параметрів магнітного поля, кутів обертання (наприклад, як електронний компас). Але дуже важливе його використання як датчика сили струму, товщини та інших величин. Цифрові датчики Хола видають на виході логічний „0” або логічну „1”, якщо параметри магнітного поля перевищують задані. Причому поріг спрацювання може встановлюватись у мікросхемі датчика за допомогою програми. Ще один тип датчиків положення або близькості, що чутливі до магнітного поля – магніторезистивні датчики. У даний час вони виготовляються з пермалою, смуги якого чергуються зі смугами алюмінію (смуги Барбера). Електричний опір цих смуг залежить від прикладеного магнітного поля тому, що змінюється сумарний вектор намагнічування доменів магніторезистора (рис.6).
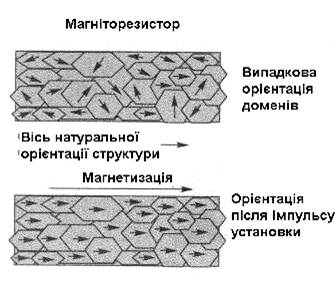
Рис.6. Дія доменів у магніторезисторі.
Для підвищення чутливості магніторезистори формуються у вигляді мостового включення чотирьох резисторів. Основні сфери використання магніторезистивних датчиків положення або близькості: контроль швидкості обертання; контроль положення; вимірювання струму; безконтактні перемикачі; компаси та гірокомпаси, визначення дефектів.
Ємнісні датчики використовують залежність ємності плоского конденсатора від відстані між пластинами конденсатора. Як відомо, ємність плоского конденсатора визначається формулою:
С = eS/d,
Де С – ємність, e - діелектрична постійна ізоляції між пластинами, S – площа поверхні пластин, d – відстань між пластинами. Розглянемо схему рис.7.
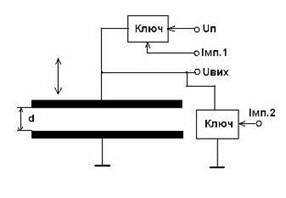
Рис.7,а. Ємнісний датчик, що реагує на відстань між пластинами
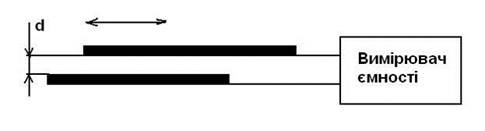
Рис.7,б. Ємнісний датчик, що реагує на зміщення пластин.
За допомогою імпульсу „Імп.1” відкриємо ключ і зарядимо конденсатор до напруги Uп (а це значить, що внесемо у конденсатор заряд q0 = CUп). Якщо ми будемо зміщувати вверх або вниз верхню пластину конденсатора (нижня залишається на місці), то при закритих ключах (незмінному заряді q0) напруга на конденсаторі Uвих = q0/C = dq0/eS і, таким чином лінійно зв’язана з відстанню d. Через деякий час за допомогою імпульсу „Імп.2” конденсатор розрядити. А потім знову зарядити, подавши імпульс”Імп.1”, бо конденсатор має властивість саморозряджуватись, бо його діелектрик має не безкінечний опір. Це перший варіант датчика положення. У другому варіанті пластини конденсатора зміщуються по горизонталі так, що площа пластин, що перекриваються змінюється, а відстань між ними не змінюється. А оскільки ємність прямо пропорційна площі пластин, то переміщення пластини пропорційно змінює ємність.
В іншому варіанті, що зображений на рис.8 датчик ємності стає датчиком близькості.

Рис.8. Ємнісний датчик близькості
У даному випадку пластини конденсатора розведені. Якщо у електричному полі цих пластин з’являється річ, що має електричну провідність, то ємність конденсатора підвищується. Збільшення ємності можна відчути, коли ємність включена у генератор електричних коливань, частота коливань якого залежить від цієї ємності. По цій частоті можна не тільки виявити появу предмета, але і відстань до нього. На цьому принципі діють деякі прилади охоронної сигналізації.
Як вказано у табл..2, ємкісний датчик нестабільний, бо на величину ємності впливають параметри зовнішнього середовища, зокрема вологість та забруднення.
Ультразвукові та радіолокаційні датчики близькості працюють на принципі вимірювання відстані до предмету, що відбиває акустичні, або радіотехнічні сигнали. Передавач випромінює у простір (як правило, у деякому просторовому куті) потужний імпульс акустичної енергії або енергії радіохвиль. Цей імпульс відбивається від предмету, повертається у зворотному напрямку, приймається у приймачі, де вимірюється інтервал між часом посилки імпульсу та часом його прийому. Відстань, на якій працюють акустичні датчики близькості обмежена великим загасанням ультразвукового акустичного сигналу у повітрі, особливо в умовах великої вологості.
У радіолокаційних систем ця відстань може бути дуже високою. Наприклад, комплекс „Радіан-12”, що використовується на полях аеродромів, може визначити появу людини на відстані до 1,2 км. Недолік радіотехнічних систем – висока вартість.
Фотоелектричні датчики близькості або положення працюють на подібному принципі. Світловипромінювач (це світлодіод або лазер) випромінює у простір світловий імпульс (як правило, в інфрачервоному діапазоні). На лінії розповсюдження цього імпульсу встановлений приймач світлової енергії. Якщо нема перешкод, то приймач одержує частину світлової енергії, якщо перешкода з’являється, то приймач її не одержує. Відстань дії цієї системи залежить від прозорості повітря, дощ, сніг або туман дуже скорочують цю відстань. Датчики положення на основі диференціальних трансформаторів у найпростішому варіанті складаються з циліндричної грати первинних та вторинних обмоток з окремою жилою, що проходить через центр. Жила має малий опір тертю та високу зносостійкість. При переміщенні вона змінє сигнал вторинної обмотки. Особливістю цього датчика є те, що ця жила не входить у електричний контакт з іншими електричними компонентами пристрою, тому датчик має високу надійність.
Оптоелектронні датчики положення
Такі датчики можуть визначати положення об’єкту на великій дистанції. Принцип роботи датчика показаний на рис.9.
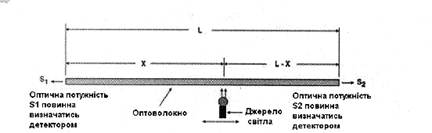
Рис.9. Принцип роботи оптоелектронного датчика положення
Місцеположення об’єкту визначається джерелом світла, яке викликає розповсюдження світла в оптоволокні. При цьому світло затухає і на першому кінці (зліва по рисунку) інтенсивність S1 = k exp(-Ax), де х – відстань від джерела до першого кінця, А – показник затухання. На другому кінці (справа по рисунку) S2 = k exp[-A(L – x)]. Відношення цих величин: S2/S1 = exp(-AL)exp(2Ax), причому перший множник – константа, а другий залежить тільки від відстані х.
Датчики сили або тиску
Ємнісні датчики
Якщо звернутись до рис.7, то датчик сили можна побудувати, якщо між пластинами конденсатора встановити пружини, а на верхню пластину подати силове навантаження. Тоді, чим більше прикладена сила, тим більше будуть стиснуті пластини, тим менша буде відстань між ними, тим більша ємність. Але, оскільки такі датчики залежать від факторів зовнішнього середовища, то використання цього принципу потребує значних конструктивних зусиль.
А ось як безконтактні кнопки ємнісні датчики застосовуються часто. Використовується різка зміна ємності при натисненні пальцем кнопки. Конструкція датчика сили з кнопкою показана на рис.10.
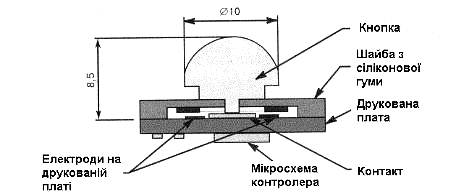
Рис.10. Конструкція датчика сили
При натисненні на кнопку відстань між провідною силіконовою шайбою та електродами змінюється. Тому змінюється і ємність між обкладками електродів на друкованій платі. Мікросхема контролера перетворює ємність датчика у напругу, а потім у цифровий код. Такі датчики використовують у клавіатурах комп’ютерів, пультах мобільних телефонів, відеокамерах тощо.
Для вимірювання тиску використовується гнучка пластина конденсатора. Якщо на цю гнучку пластину поданий тиск, вона наближується до іншої постійної пластини конденсатора, тому ємність конденсатора змінюється в залежності від тиску. На рис.11 зображена така конструкція датчика тиску.
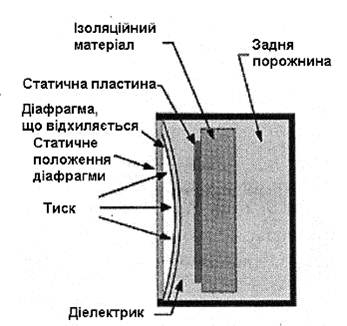
Рис.11. Конденсаторний датчик тиску
У конкретних конструкціях формуються складні форми діафрагм, що дозволяють одержати комбінації лінійності, чутливості та частотної характеристики.
П’єзоелектричні датчики
Дія цього датчика основана на використанні п’єзоелектричного ефекту, при якому при стисненні кристалу на його гранях з’являються електричні заряди. Такі датчики не потребуються зовнішнього збудження. Схема датчика показана на рис.1
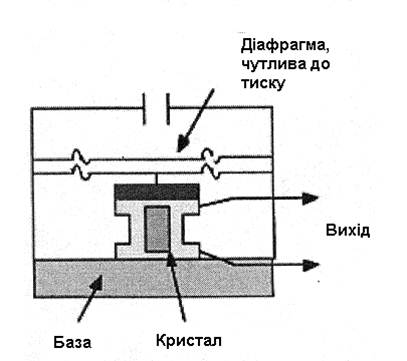
Рис.1 П’єзоелектричний датчик тиску
Під дією тиску діафрагма натискає на кристал і на тому з’являється напруга, що пропорційна тиску. Ці датчики доцільно застосовувати, якщо вимірюється тиск, що швидко змінюється. Головна якість цих датчиків – високі динамічні характеристики (частоти до десятків МГц). Реальна конструкція такого датчика показана на рис.13.
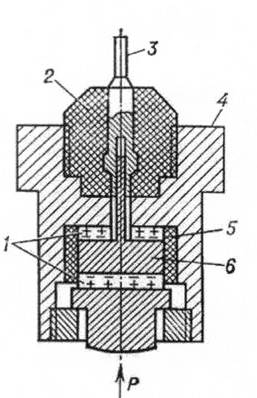
Рис.13. Конструкція п’єзоелектричного датчику тиску
Р – вимірюваний тиск, 1 – п’єзопластини, 2 – гайка з діелектрику, 3 – електричний вивід, 4 – корпус, що є другим виводом, 5 – ізолятор, 6 – металічний електрод.
Тензорезистивні датчики
Тензорезистивний ефект – зміна електричного опору резистора під впливом розтягування або стиснення. Опір будь-якого дроту залежить від його довжини та зрізу у відповідності до формули:
R = rL/S,
де r - питомий опір металу при заданій довжині та зрізу, L- довжина дроту, S – його зріз. Якщо до цього дроту надати фізичне зусилля, він витягнеться, а його зріз зменшиться. Обидва фактори збільшують опір дроту як резистора. При стисненні ці фактори впливають у зворотному напрямку. Для збільшення впливу тиску дріт вкладають у вигляді багатьох витків на непровідній основі, як це показано на рис.14.
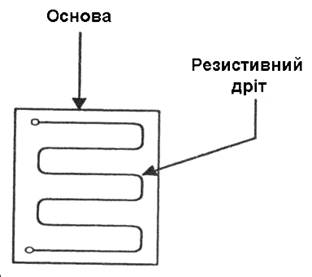
Рис.14 Конструкція тензорезистивного датчика
Для збільшення чутливості тензорезистивний датчик встановлюють як елемент моста, діагональ якого підключається до входів операційного підсилювача, як це показано на рис.15.
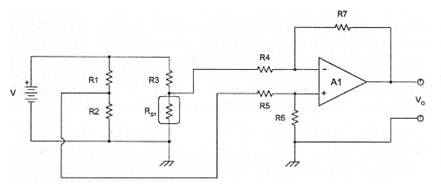
Рис.15. Схема використання тензорезистивного датчика
Зміна опору тензорезистивного датчика Rs1 призводить до зміни напруги в діагоналі мосту, яка підключена до протифазних входів операційного підсилювача А1. Тому на виході операційного підсилювача напруга V0 є підсиленим сигналом збільшення або зменшення сигналу тензорезистивного датчика.
Фірма Tekscan Technology виробляє тензодатчики у вигляді тонких плівок, які можна розмістити між будь-якими поверхнями. Опір плівки максимальний при відсутності тиску і зменшується при зростанні тиску. Якщо від плівки зробити декілька відводів, то можна вимірювати профілі тиску. Фірма виробляє також матриці датчиків, які дозволяються досліджувати двомірні профілі тиску. На рис.16 показана схема такого датчика та інтерфейсні пристрої до неї. Такі датчики використовуються, наприклад, для вимірювання тиску у медичних пристроях (протезах, тощо).
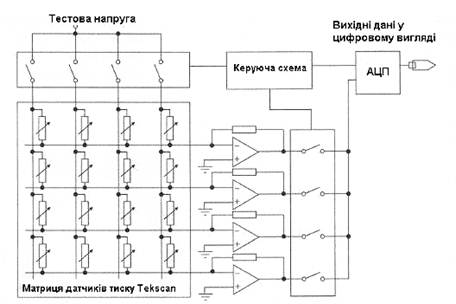
Рис.16. Матриця датчиків для двомірних вимірювань тиску
У якості тензорезисторів можуть використовуватись напівпровідникові матеріали, але вони мають більш високу температурну залежність. Якщо у мікросхемі зробити термокомпенсацію, то датчики такого типу можуть працювати як сканери тиску з великою кількістю точок вимірювання і з великою швидкість опитування.
Датчики сили і тиску дуже розповсюджені в промисловості та побуті.
Автомобільні та авіаційні застосування
- вказівними рівня та витрати палива;
- висотоміри;
- індикатори швидкості потоків газів та рідин;
- індикатори роботи та стану фільтрів;
- керування засобами безпеки пасажирів.
Медичні та біологічні застосування
- вимірювання тиску крові;
- моніторинг стану організму;
- керування засобами дихання, вентиляції та фільтрації.
Промислові та комерційні застосування
- системи керування роботами;
- засоби автоматизації будівельних робіт;
- промислові верстати та устаткування;
- системи кондиціювання;
- керування потоками газів та рідин;
- побутова техніка.
Датчики рівня рідини
Рідкі матеріали (паливо, олія, вода тощо) звичайно зберігаються у металевих ємностях. Скільки рідини залишилось в цій ємності потрібно знати увесь час. У давні часи робили скляні вікна, через які можна було бачити рівень. Але ці вікна розбивались, засмічувались, це було найслабкіше місце в усій конструкції. Використовувались також поплавці, відстань до яких контролювалась. Сучасні засоби дозволяють більш надійно визначати рівень рідини.
Використання датчику тиску показане на рис.17.
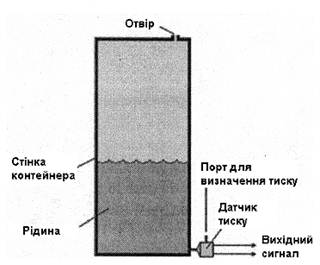
Рис.17. Датчик тиску у якості датчика рівня рідини.
У донній частині контейнеру роблять порт для підключення датчику тиску. Зрозуміло, що чим вище рівень рідини, тим більший тиск у донній частині контейнеру. Звичайно, цей тиск треба перерахувати у рівень в залежності від питомої щільності рідини.
Ємнісний датчик тиску показаний на рис.18.
У рідину встановлюється вертикальний конденсатор, довжина якого дорівнює висоті контейнера. Частина конденсатора знаходиться у повітрі, діелектрична постійна якого e = 1, а частина – у рідині з більшою діелектричною постійною e. Чим вище рівень рідини, тим більша ємність конденсатора. Масла мають діелектричну постійну між 1,8 та 5, гліцерин – 37, а водні розчини різних речовин – від 50 до 80. У якості другої обкладинки конденсатора можна використовувати стінку контейнера. Якщо рідина електропровідна, то пластини конденсатору треба покрити ізоляційною плівкою.

Рис.18. Ємнісний датчик тиску
Ультразвуковий датчик рівня закріплюється на верхній кришці контейнера. Він випромінює ультразвуковий імпульс, який відбивається від поверхні рідини. По запізненню прийнятого імпульсу відносно випроміненого можна визначити рівень рідини. Використання такого датчика показане на рис.19.
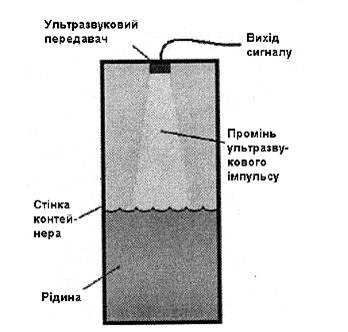
Рис.19. Ультразвуковий датчик рівня
На цьому ж принципі працює радіолокаційний датчик рівня.
Потенціометричний датчик рівня
По всій висоті контейнера встановлюється вертикальна нитка з високорезистивного сплаву. Через цю нитку пропускається струм, який її нагріває до досить високої температури. Але та частина нитки, що знаходиться у воді Rin, охолоджується, а та частина, що знаходиться на повітрі Rout – нагрівається. Сума опорів Rin + Rout дає значення рівня – чим вище рівень, тим менша сума. Див. рис.20.
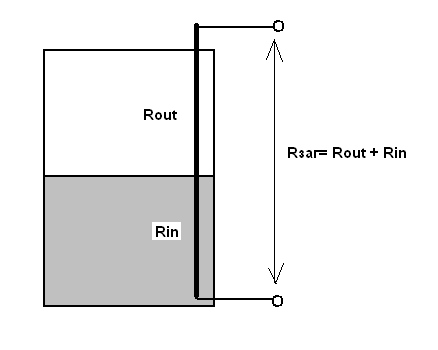
Рис.20. Потенціометричний датчик рівня.
Оптоелектронний датчик
В цьому датчику у полімерному корпусі міститься світло випромінюючий діод інфрачервоного діапазону та фотоприймач. Якщо датчик не контактує з рідиною, то інфрачервоне випромінювання повністю відбивається від границі полімер-повітря (рис.21).
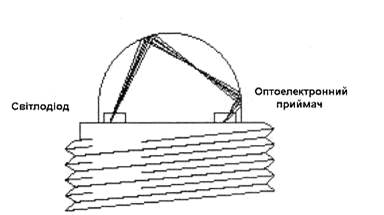
Рис.21. Оптоелектронний датчик рівня
Якщо датчик контактує з рідиною, то інфрачервоне випромінювання не приходить на оптоелектронний приймач і струм через цей приймач різко спадає. Такі датчики встановлюють в контейнерах з рідиною на різних рівнях. Для таких датчиків не важливо, яка рідина. Часто їх використовують в бензобаках.
Датчики кутових величин
Потенціометричний датчик кута нахилу
Цей датчик використовується, коли об’єкт, на якому він встановлюється, змінює своє положення у просторі (транспортний засіб, корабель тощо). На засобі встановлюється потенціометр, у якого є початок та кінець резистивної обмотки. Рухома частина потенціометру (повзунець) закріплений за допомогою тяги на вертикальному вантажі. Якщо нахил об’єкту змінюється, потенціометр змінює своє положення у просторі, а вантаж – ні. Тому відношення опорів плечей потенціометра R1/R2 залежить від куту нахилу, як це показано на рис.2
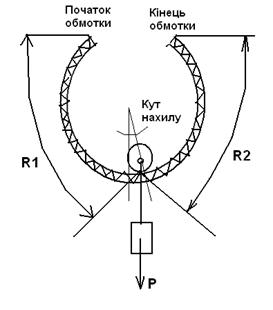
Рис.2 Потенціометричний датчик кута нахилу
Кодоперетворювач кута
Цей пристрій дозволяє перетворити кут повороту у цифровий код. Для цього треба створити кодову матрицю, яка показана на рис.23.
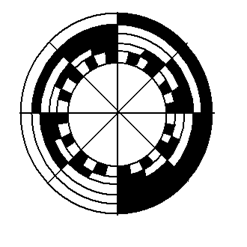
Рис.23. Кодова матриця для перетворення кута
Зовнішнє кільце матриці поділене на два сектори: перший 180° - світлий, другий від 180° до 360° - темний. Це самій старший розряд двійкового коду. Наступне кільце поділене на 4 частини по 90°: перша світла, друга темна, знову світла і знову темна. Це другий розряд двійкового коду. Трете кільце поділене на 8 частин по 45°, четверте – на 16 частин по 22,5°, п’яте – на 32 частини по 12,25° і т. і. Кожне наступне кільце має удвічі більше ділень, ніж попереднє. Кодову матрицю виготовляють на диску, який встановлюють на пристрої, що повертається. Диск освітлюється, а відбите світло попадає на фотодіоди ФД, кожен з котрих встановлений над відповідним сектором кодового диску, як це показане на рис.24.
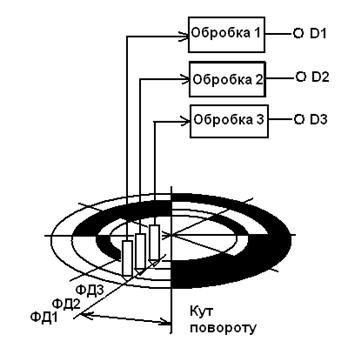
Рис.24. Обробка даних кодової матриці
Сигнали фотодіодів оброблюються у блоках обробки, де вони підсилюються та проходять через компаратори, в результаті чого визначаються розряди цифрового коду кута повороту.
Датчики прискорення та удару
Акселерометри за технологією MEMS
Технологія MEMS (Micro Electro Mechanical System – мікро електронно-механічні системи) дозволяє у корпусі мікросхеми розмістити як електронні, так і механічні системи. Завдяки цьому можна механічні переміщення елементів мікросхеми перетворювати у електричні сигнали, зокрема цифрові. Типова структура такого датчика показана на рис.25.
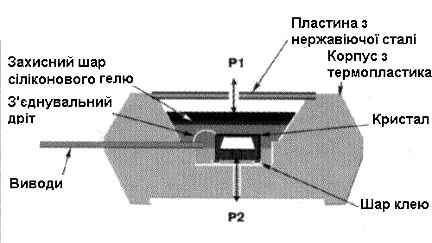
Рис.25. Структура датчика MEMS
У якості кристалу може бути ємнісна, п’єзоелектрична, оптична, ферроелектрична система, що реагує на прискорення або удар. На рис.26 показана структура ємнісної системи, пластини якої мають товщину 20 мікронів.
Рис.26. Структура ємнісної системи
Під дією прискорення або удару пластини однієї групи зміщуються відносно другої групи, тому змінюється ємність конденсатора, яка потім перетворюється у електричний сигнал. Діапазон прискорень, наприклад для датчика ADXL202 складає ±2g.
Іншим прикладом є гіроскоп або датчик кутового прискорення. Принцип дії приладу показаний на рис.27.
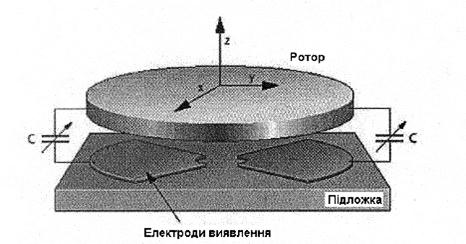
Рис.27. Структура гіроскопу
Під дією кутового прискорення або кутового переміщення ротор повертається відносно електродів виявлення, завдяки чому змінюється ємність системи. Ця ємність перетворюється у вихідну напругу, що пропорційна куту переміщення. У гіроскопа ADXRS300 цей кут досягає ±300°.
3. Датчики температури
Термічні резистори
Як відомо, опір металічних провідників залежить від температури відповідно до формули:
Rt = R0[1 + a(T2 – T1)],
де Rt – опір при температурі Т2, R0 – опір при температурі Т1, a - температурний коефіцієнт, що залежить від металу, який використовується, наприклад, для заліза a = +0,005; для платини a = 0,0038; для алюмінію a = 0,0038 тощо. Зараз, як правило, використовують платинові датчики, які на відміну від інших металів мають високу лінійність (у діапазоні температур від 0 до +100°С лінійність складає ±0,2%). Платинові датчики використовуються в широкому діапазоні температур – від -183 до +630°С. При більш низьких температурах використовують датчики з родію.
Термістори
Термістори – це нелінійні напівпровідникові резистори. Вони являють собою тонкий шар напівпровідника, що розміщується на оксидах міді, кобальту, нікелю, або інших металів. На відміну від термічних резисторів зміна опору таких резисторів дуже велика: від 4 до 6% на один градус Цельсію. Термістори бувають двох типів: негативні та позитивні. У перших опір зменшується при зростанні температури, у других – збільшується. Залежність опору від температури описується формулою:
Rt = R0 exp[b(1/T2 – 1/T1)],
де Rt – опір при температурі Т2, R0 – опір при температурі Т1, b - фактор, що залежить від матеріалу і виражається у градусах Кельвіна, він звичайно знаходиться між 1500°К та 7000°К. Для порівняння зміна опору від температури для термічних резисторів та термісторів показана на рис.28.
Термопари
Термоелектричні явища були відкриті Томасом Зеебеком у 1821 р. Якщо підігріти спай двох різних металів, то на кінцях їх виводів з’явиться напруга пропорційна зміні температури з коефіцієнтом, залежним від того, яка пара металів використовується (рис.29).
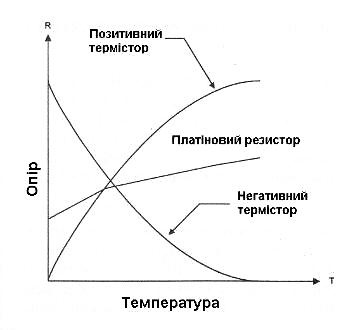
Рис.28. Зміна опору від температури для термічного резистора
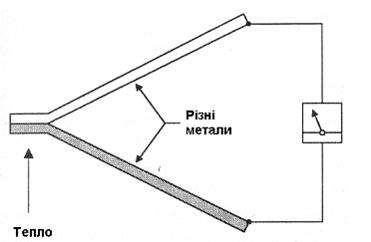
Рис.29. Схема ефекту Зеебека
Ці спаї в типовому випадку використовуються парами – гарячий спай та холодний спай, тому потенціал Зеебека пропорційний різниці температур між спаями. Холодний спай потрібно поміщати, наприклад, у холодну воду з температурою 0°С. Але в апаратурі частіше роблять штучний холодний спай, як це показано на рис.30.
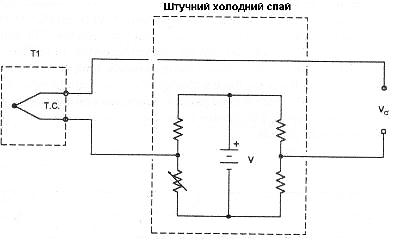
Рис.30. Схема зі штучним холодним спаєм
Замість холодного спаю вміщують схему, яка має такий самий потенціал Зеебека, як холодний спай.
Термопари частіше використовують для вимірювання високих температур, наприклад, 1500°С.
Мікросхемні датчики температури
Ці датчики являють собою стабілітрони, у яких напруга стабілізації залежить від температури з коефіцієнтом 10 мВ/°K. Еквівалентний стабілітрон має динамічний опір менший за 1 Ом і працює в діапазонах температур від -55 до +150°С. Для таких мікросхем, як LM135, LM235, LM335 похибка вимірювань складає менша за 1°С. Схема включення мікросхем такого типу показана на рис.31.
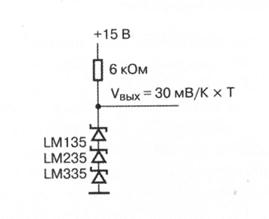
Рис.31. Схема включення мікросхемного датчика температури
4. Датчики вологості
Сорбційно-ємкісні датчики
Принцип дії таких датчиків заснований на залежності діелектричної проникливості сорбенту від кількості вологи, яка в ньому знаходиться. Шар сорбенту знаходиться між двома пласкими електродами, що утворюють конденсатор. У якості сорбенту використовують окисли металів та кремнію. Сорбційно-ємкісні датчики мають практично лінійну залежність „вологість-ємкість”. Сучасні датчики такого типу мають діапазон вимірювання вологості від 0 до 100%, лінійність у цьому діапазоні 1%.
Резистивні датчики вологості
У датчиків цього типу при зміні вологості змінюється опір сорбенту (чергування шарів пористої платини та полімеру, що нанесені на підложку з кремнію) . Вони є менш точними і мають велику залежність від температури (до 0,6% опору на 1 градус Цельсія). Без кіл температурної компенсації їх можна використовувати тільки у приміщеннях зі стабільними температурними умовами (комори, овочесховища). Діапазон вимірювання вологості: від 30 до 90%, лінійність у цьому діапазоні 5%.
Термісторні датчики вологості
У схемі рис.32 у вимірювальний міст включені два однакові термістори Rt1 та Rt2, що прогріваються струмом від джерела +U.
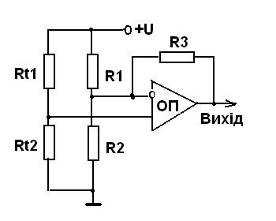
Рис.3 Термісторний датчик вологості
Різниця між ними у тому, що один з них поміщений у скляну оболонку, а другий – ні. Чим більша вологість, тим більше охолоджується термістор, що не знаходиться у скляній оболонці, тим більше розбаланс мосту, що підсилюється операційним підсилювачем ОП. Тому напруга на виході прямо пропорційна вологості. Перевага такої схеми – у незалежності від температури, бо опори термісторів від температури змінюються однаково.
5. Датчики газу
Датчики газу поділяються на:
- детектори вибухонебезпечних газів;
- детектори токсичних газів;
- детектори вентиляції автомобіля (пари бензину);
- детектори органічних розчинників;
- детектори фреону;
- детектори вуглекислого газу;
- детектори концентрації кисню тощо.
Принцип дії датчика на основі оксиду олова оснований на зміні електропровідності напівпровідникової плівки внаслідок абсорбції газу на її поверхні. Побудова датчика показана на рис.33.
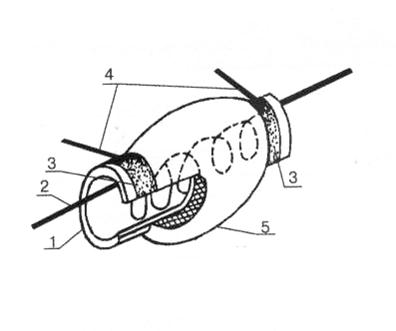
Рис.33. Побудова датчика газу
1 – керамічна трубка тримача; 2 – резистивний нагрівач; 3 – електрод; 4 – затиски; 5 – легований оксид олова.
На трубку з оксиду алюмінію нанесений тонкий шар оксиду олова (SnO2), що легований деякими металами (платина, мідь, нікель, паладій), кожний з яких підвищує чутливість до конкретного газу. При нагріванні до 400°С за допомогою нагрівача на поверхні оксиду олова має місце адсорбція кисню, яка залежить від газу домішки. Тому змінюється електрична провідність датчика. Такий датчик включають у резистивний міст по схемі рис.34. Щоб компенсувати температурну залежність датчика, у такий міст включають також термістор Rt.
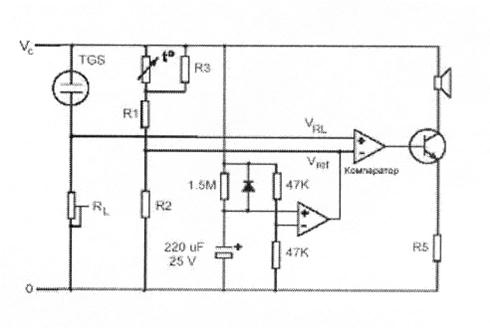
Рис.34. Схема включення датчика газу
6. Датчики струму
Звичайно у приладах у якості датчика струму використовують резистор з малим опором і вимірюють падіння напруги на такому резисторі. Але коли струм дуже великий доводиться використовувати дуже малі опори, які важко калібрувати. Вище вже згадувалось, що у якості датчика струму можна використовувати датчик Хола, який є безконтактним датчиком і не вносить похибок у вимірювальне коло. Приклад використання такого датчика показаний на рис.35.
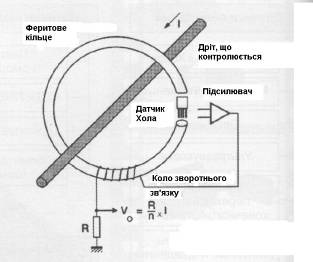
Рис.35 Схема датчика струму
7. Інтерфейси датчиків
Існує велика кількість датчиків з різними вихідними характеристиками. Для сполучення датчиків з аналого-цифровими перетворювачами та іншими вимірювальними засобами потрібні інтерфейси. Це підсилювачі з різними вхідними можливостями. На рис.36 показані чотири типи таких підсилювачів.
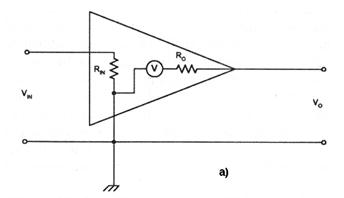
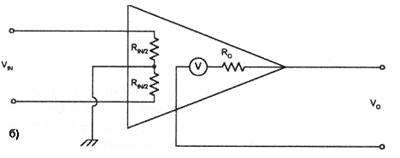
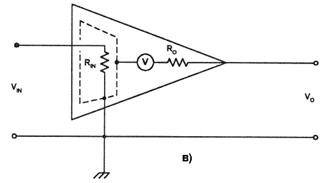
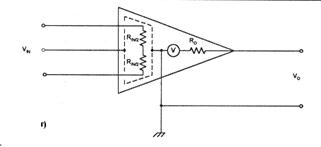
Рис.36. Чотири типи підсилювачів датчиків
Інтерфейс першого типу призначений для однополярних датчиків, з досить значною напругою на виході. Якщо така напруга мала (на рівні мілівольт), ця схема непридатна.
Інтерфейс другого типу призначений для двополярних датчиків, дві напруги яких перетворюються у одну вихідну напругу.
Інтерфейс третього типу призначений для „плаваючих” датчиків, у яких напруга не пов’язана з зовнішніми колами (оптоелектронний зв’язок). Інтерфейс четвертого типу – теж саме, але для двополярних датчиків.
| Електроніка та мікропроцесорна техніка | |
|
Інструкційна картка №1 для самостійного опрацювання навчального матеріалу з дисципліни "Основи електроніки та мікропроцесорної техніки" І. Тема: 1 ... Під дією енергії магнітного поля струм продовжує проходити в тому самому напрямку і зменшуватись, конденсатор перезаряджається, напруга на ньому, напрямлена проти е. р. с. котушки ... В інверторах струму силове коло схеми підминається до джерела постійної напруги через дросель L з великим індуктивним опором (як відомо, джерело струму повинно мати великий опір). |
Раздел: Рефераты по коммуникации и связи Тип: учебное пособие |
| Розробка інвертора напруги для апаратури зв'язку | |
|
Содержание Вступ 1. Системи електропостачання 1.1 Види систем електроживлення 1.2 Планування систем електроживлення 1.3 Вимоги до систем ... Такі відмінності обумовлені тим, що у випадку з джерелом напруги у вигляді модифікованої синусоїди конденсатор заряджає від імпульсного джерела напруги з високою швидкістю зміни ... Можна показати, що потужність втрат при джерелі напруги у вигляді модифікованої синусоїди не залежить від опору втрат, а лише від величини конденсатора. |
Раздел: Рефераты по физике Тип: дипломная работа |
| Діагностика системи запалення ДВЗ | |
|
ЗМІСТ Вступ і постановка завдання 1 Призначення та різновиди систем запалення 1.1 Джерело живлення для системи запалювання 1.2 Вимикач запалювання 1.3 ... При використанні відповідних датчиків, можна одержати графік розрідження у впускному колекторі (датчик розрідження вхідний у базовий комплект), тиску в циліндрах двигуна (датчик ... Таким чином небезпечними факторами при перевірці проводів системи запалення є висока напруга, причому напруга значно вище 1000 В, що може привести до уражень електричним струмом ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Комп"ютерна електроніка | |
|
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ЧЕРНІВЕЦЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ІМЕНІ ЮРІЯ ФЕДЬКОВИЧА Факультет комп"ютерних наук Кафедра комп"ютерних ... Аналогічно можна показати, що процес розрядки конденсатора від заданого рівня напруги буде описуватись співвідношенням: Нехай на одному виході в певний момент часу напруга приймає максимальне значення, тобто логічну 1, на іншому -логічний 0. Тоді за рахунок заряду конденсатора, що з"єднаний з ... |
Раздел: Рефераты по коммуникации и связи Тип: курсовая работа |
| Охорона праці | |
|
КОНСПЕКТ ЛЕКЦІЙ ДЛЯ СТУДЕНТІВ ТЕФ з навчальної дисципліни "БЕЗПЕКА ЖИТТЄДІЯЛЬНОСТІ та ОХОРОНА ПРАЦІ" розділ 2 "ОХОРОНА ПРАЦІ" Розділ 2. ОХОРОНА ПРАЦІ ... Однак, слід зауважити, що вищезазначене стосовно порівняльної небезпеки постійного та змінного струму є справедливим лише для напруги до 500 В. При більш високих напругах постійний ... Посудини з швидкозмінними затворами повинні мати запобіжні пристрої проти включення посудини під тиск при відкритих швидкознімних пристроях і відкривання цього пристрою за ... |
Раздел: Рефераты по безопасности жизнедеятельности Тип: учебное пособие |