Курсовая работа: Синтез следящей системы с обратной связью по току и по скорости
Введение
Состояние любого технического устройства характеризуется одной или несколькими физическими величинами.
Совокупность предписаний, определяющих характер изменения выходных величин объектов, называется алгоритмом функционирования.
К основным алгоритмам функционирования систем автоматического управления относятся:
· поддержание постоянного значения
(стабилизации) управляемой переменной, ![]() ;
;
· изменение управляемой величины по заданному закону;
· изменение управляемой переменной по заранее не известному закону.
В зависимости от этого системы автоматического управления делят на:
o стабилизирующие системы;
o системы программного управления;
o следящие системы.
В курсовом проекте рассматривается синтез следящей системы с обратной связью по току и по скорости. В следящих системах характер изменения управляющего воздействия заранее не может быть точно установлен, так как этот характер определяется процессами, протекающими вне системы. Следящие системы предназначены для измерения управляемой величины по произвольному закону, например, для изменения положения радиолокационной антенны в зависимости от движения цели, траектория которого заранее не известна.
В качестве метода синтеза применяется метод обратных амплитудно-частотных характеристик.
Исходные данные
| Суммарная ошибка |
|
| Скорость изменения задающего воздействия |
|
| Ускорение изменения задающего воздействия |
|
| Третья производная изменения задающего воздействия |
|
| Отношение моментов |
|
| Перерегулирование |
|
| Быстродействие |
|
| Момент инерции |
|
| Передаточное число редуктора |
|
Тип исполнительного двигателя МИ-22.
Технические данные двигателя.
| Номинальная мощность |
|
| Номинальное напряжение |
|
| Номинальный ток |
|
| Сопротивление силовой цепи |
|
| Частота вращения |
|
| Момент инерции двигателя |
|
| КПД двигателя |
|
Выберем электромашинный усилитель:
![]() .
.
Электромашинный усилитель ЭМУ-3А3.
Тип усилителя и его параметры.
| Номинальная мощность |
|
| Номинальное напряжение |
|
| Номинальный ток |
|
| Частота вращения |
|
| Коэффициент усиления |
|
| Постоянная времени |
|
| Коэффициент демпфирования |
|
1. Синтез следящей системы с отрицательной обратной связью по току и по скорости
Принципиальная схема проектируемой следящей системы.
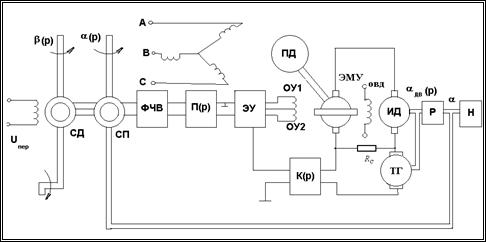
1.1 Основные элементы принципиальной схемы следящей системы
ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака.
П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала пропорциональной производной и интеграла от ошибки.
СД – сельсин-датчик используется в качестве задающего устройства (во многих системах используется вращающий трансформатор).
СП – сельсин-приемник электрически связан с СД, а механически с валом нагрузки.
Сельсинная пара СД-СП работает в трансформаторном режиме, сравнивает углы (вычитает их), преобразует угол поворота в напряжение на выходе. При этом сельсинная пара выполняет роль трех элементов:
· Задающего элемента (СД);
· Измерительного элемента (СП);
· Элемента сравнения.
ЭУ – электронный усилитель имеет несколько входов, что позволяет использовать для организации местных обратных связей.
ИД – исполнительный двигатель – ДПТ (двигатель постоянного тока).
Р – редуктор.
Н – нагрузка.
К(р) – параллельное корректирующее устройство
ОУ1, ОУ2 – обмотки управления ЭУ.
ЭМУ – электронно-машинный усилитель.
ПД – приводной двигатель ЭМУ.
RC – сериесное сопротивление вводится для формирования сигнала обратной связи по току.
ОВД – обмотка возбуждения двигателя.
ТГ – тахогенератор, напряжение на выходе которого пропорционально частоте вращения вала двигателя. Тахогенератор осуществляет обратную связь системы по скорости.
1.2 Структурная схема проектируемой следящей системы
Структурная схема проектируемой следящей системы представлена на рис.2.
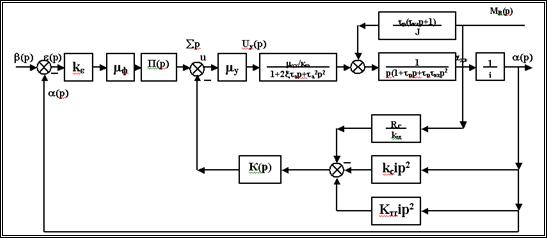
Рис.2.
Основные элементы структурной схемы следящей системы:
кe - коэффициент, характеризующий крутизну характеристики сельсинной пары.
mф – коэффициент передачи ФЧВ.
П(р) – последовательное корректирующее устройство.
åр – выходной сигнал второго сумматора.
Uу(р) – выходной сигнал ЭУ.
mу – коэффициент усиления ЭУ.
mхх – коэффициент холостого хода ЭМУ.
Кw - коэффициент противо-ЭДС.
tа – постоянная времени.
xа – коэффициент демпфирования.
tкз – постоянная времени короткого замыкания.
J – момент инерции двигателя.
i – передаточное число двигателя.
км – коэффициент пропорциональности между моментом и током двигателя.
МВ – возмущающий момент.
Ктг – коэффициент передачи тахогенератора.
1.3 Математическое описание системы
1. Уравнение тахогенератора.
 (1)
(1)
2. Напряжение на сериесном сопротивлении RC:
![]() ;
;
Запишем уравнение исполнительного двигателя:
![]() ;
;
![]() ;
;
![]() ;
;
МЭМ, МВ – электромагнитный и возмущающий моменты.
![]() ;
;
![]() ;
;
Выразим ток ![]() :
:
![]() ;
;
![]() ; (2)
; (2)
Введем обозначение:
![]() ;
;
![]() .
.
3. Уравнение первого сумматора:
![]() . (3)
. (3)
4. Уравнение электронного усилителя:
![]() . (4)
. (4)
5. Уравнение редуктора.
![]() ;
;
![]() . (5)
. (5)
6. Уравнение силовой части ЭМУ-Д.
 ;
;
 ;
;
![]() ;
;
![]() ;
;
![]() . (6)
. (6)
7. Уравнение второго сумматора.
 ; (7)
; (7)
Подставим уравнение (7) в формулу (4):
![]() ; (8)
; (8)

Разделим левую и правую части
уравнения на передаточное число редуктора i. При этом в левой части уравнения оставим только
слагаемые, содержащие ошибку ![]() .
.
 .
.
Введем обозначения:
Коэффициент разомкнутой системы:
![]() .
.
Коэффициент обратной связи по току:
![]() .
.
Коэффициент обратной связи по скорости:
![]() .
.
Перепишем уравнение с учетом введенных обозначений:
![]()
Разделим левую и правую части
уравнения на слагаемое ![]() .
.
 .
.
Так как
![]() ,
,
то
![]() - коэффициент усиления системы по
моменту;
- коэффициент усиления системы по
моменту;
![]() .
.
 . (9)
. (9)
Уравнение (9) представляет собой уравнение разомкнутой скорректированной системы, разрешенной относительно сигнала ошибки. На основе принципа суперпозиции для линейных САУ обратная передаточная функция разомкнутой системы может быть получена из уравнения (11) при МВ=0.
![]() . (10)
. (10)
В случае отсутствия последовательного корректирующего устройства (при П(р)=1) обратная передаточная функция для системы с обратной связью по току определится следующим образом:
![]() . (11)
. (11)
2. Постановка задачи синтеза
В том случае, если в качестве исходных данных заданы принципиальная схема системы и параметры ее основных элементов, а также требования к динамическим свойствам, постановка задачи может быть сформулирована следующим образом: с целью улучшения показателей качества управления в определенные места системы включаются устройства, называемые корректирующими.
Корректирующие устройства бывают последовательные и параллельные.
В качестве основного метода синтеза в курсовом проекте применяется метод обратных логарифмических частотных характеристик.
Сущность этого метода сводится к следующему. Пусть задана структурная схема следящей системы в самом общем виде, содержащая последовательное П(р) и параллельное К(р) корректирующие устройства и охваченную часть системы W0(p) (см. рис.3).
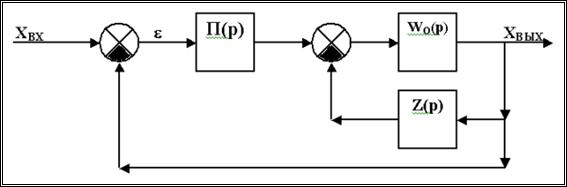
Рис.3.
В процессе синтеза надо стараться ввести такие корректирующие устройства, которые изменят исходную ЛАЧХ системы таким образом, чтобы ЛАЧХ скорректированной системы совпадала с желаемой ЛАЧХ. Тогда передаточная функция разомкнутой скорректированной системы:
![]() ,
,
а соответствующая ей обратная передаточная функция:
![]() .
.
Обеспечение требуемых динамических
свойств, определяемых быстродействием, ошибкой, запасами устойчивости,
достигается путем введения в структурную схему системы параллельных
корректирующих устройств, которые деформируют ОЛАЧХ исходной системы в
существенном диапазоне частот ![]() (см. рис.4).
(см. рис.4).
Последовательные корректирующие устройства обладают повышенной чувствительностью к помехам и ухудшают динамику системы при изменении ее параметров.
Замечаем, что в диапазоне частот ![]()
 ,
,
а следовательно
 .
.
Ввиду этого, можно приближенно считать, что в рассматриваемом диапазоне частот ЛАЧХ синтезированной системы определяется ЛАЧХ параллельного корректирующего устройства (так как обе части делятся на одно и то же число):
![]() .
.
С другой стороны, в диапазоне
частот ![]() и
и ![]()
![]() .
.
Поэтому
и, следовательно, в рассматриваемых диапазонах справедливо равенство
![]() .
.
Поэтому ОЛЧХ скорректированной
системы приближенно можно представить в виде ломаной ABCDEF, как это показано на рис.4. Здесь ОЛЧХ синтезированной САР состоит из тех участков,
определяемых охваченной частью  (участки AB
иDEF), и прямой ЛАЧХ, определяемой
параллельным корректирующим устройством
(участки AB
иDEF), и прямой ЛАЧХ, определяемой
параллельным корректирующим устройством ![]() (участок BCD),
которые оказываются большими по своей ординате.
(участок BCD),
которые оказываются большими по своей ординате.
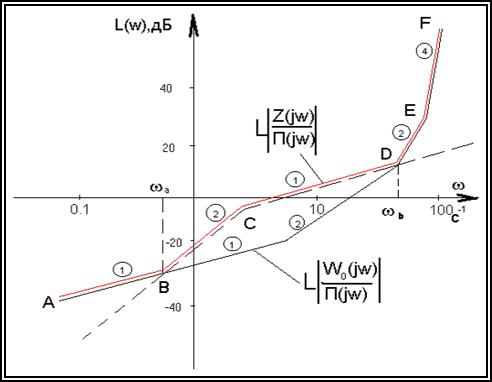
Рис.4.
3. Построение обратной логарифмической частотной характеристики неизменяемой части системы
Обратная передаточная функция неизменной части системы при коэффициенте разомкнутой системы к=1 и П(р)=1 имеет вид:
![]() .
.
Определим действующее значение сопротивления силовой цепи ЭМУ-Д, которое равно сумме действующего сопротивления ЭМУ и сопротивления якоря двигателя:
![]() , где
, где
![]() ;
;
![]() .
.
Находим коэффициент противо-ЭДС двигателя:
 .
.
Находим постоянную времени разгона двигателя:
![]() ,
,
J – суммарный момент инерции якоря двигателя и объекта, приведенный к валу двигателя.
![]() .
.
![]() .
.
Тогда
![]() .
.
![]() .
.
Сопрягающие частоты:
![]() ;
;
![]() .
.
Масштаб:
1 дек = 50 мм;
20 дБ = 25 мм.
Построение ОЛАЧХ неизменяемой части системы показано на рис5
4. Построение желаемой обратной логарифмической частотной характеристики
В основу построения ОЖЛАЧХ следящих систем должны быть положены следующие основные показатели качества: точность слежения, быстродействие, запасы устойчивости по фазе и амплитуде, фильтрующие свойства. Достижению каждого из них соответствует реализация определенных участков ОЖЛАЧХ.
Закон изменения задающего воздействия:
![]() , где
, где
![]() - постоянная составляющая
скорости изменения задающего воздействия.
- постоянная составляющая
скорости изменения задающего воздействия.
![]() - амплитудное значение
гармонической составляющей задающего воздействия.
- амплитудное значение
гармонической составляющей задающего воздействия.
![]() - рабочая частота гармонической
составляющей.
- рабочая частота гармонической
составляющей.
Продифференцировав три раза закон изменения задающего воздействия, получим:

Отсюда определяем:
Амплитуда гармонического сигнала:
 ;
;
Рабочая частота:
 ;
;
Постоянная составляющая скорости изменения задающего воздействия:
![]() .
.
Для того, чтобы задающее воздействие воспроизводилось с требуемой точностью, ОЖЛАЧХ должна проходить не выше контрольной рабочей точки с координатами:
 .
.
Гармоническая составляющая ошибки:
![]() ;
;
 .
.
Тип ОЖЛАЧХ выбираем в соответствии
со следующими правилами: так как величина отношения ошибки ![]() к амплитуде
управляющего воздействия
к амплитуде
управляющего воздействия ![]() удовлетворяет неравенству
удовлетворяет неравенству
![]() .
.
Выбираем 3 тип ОЖЛАЧХ.
Частота привязки определяется из выражения:
 .
.
Передаточная функция скорректированной системы для ОЛАЧХ 3 типа:
![]() .
.
Построение ОЖЛАЧХ показано на рис.5а (на доп. чертеже). По построению видно, что ОЖЛАЧХ проходит через контрольную точку. Сопрягающие частоты ОЖЛАЧХ и соответствующие им постоянные времени:
![]() ;
; ![]()
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
5. Синтез корректирующих устройств
Применение корректирующих устройств преследует две цели:
1. обеспечить требуемую точность системы;
2. получить приемлемый характер переходных процессов, т.е. качество регулирования.
Применение этих устройств направлено на введение в алгоритм управления производных и интегралов от ошибки и от внешних воздействий. При этом дифференцирование и интегрирование может осуществиться либо во всем частотном диапазоне работы системы, либо на некотором его интервале. Последовательные корректирующие устройства размещают в цепи основного воздействия, а параллельные – в цепях обратных связей.
Наиболее универсальным и эффективным методом повышения точности является увеличение общего коэффициента усиления. Это можно сделать за счет введения в систему дополнительных усилителей.
Однако при увеличении общего коэффициента усиления система приближается к границе устойчивости. При некотором предельном значении коэффициента усиления система может стать неустойчивой. Таким образом, корректирующие устройства должны не только увеличить коэффициент усиления системы, но и одновременно повысить запас ее устойчивости.
5.1 Синтез последовательного корректирующего устройства
Определяем получившийся
коэффициент усиления разомкнутой системы как разность между ординатой ОЛАЧХ
неизменяемой части и ординатой ОЖЛАЧХ при частоте ![]() .
.
![]() ;
;
![]() .
.
Введем последовательное корректирующее устройство дифференциально-интегрирующего типа.
Определяем получившуюся суммарную ошибку:
![]() ;
;
После окончания переходного процесса постоянная составляющая скорости изменения задающего процесса будет иметь постоянное значение, а обусловленная ею составляющая ошибки определяется только статикой системы. В статике передаточная функция системы равна ее коэффициенту усиления. Поэтому
 ;
;
Составляющая моментной ошибки:
![]() ;
;
Ток короткого замыкания в якорной цепи двигателя при номинальном напряжении:
![]() ;
;
Номинальная скорость двигателя:
![]() ;
;
![]() ;
;
![]() .
.
Сравним:
![]() ;
;
![]() .
.
Вводим последовательное корректирующее устройство с передаточной функцией:
![]() ;
;
При этом
![]() .
.
Минимальное значение коэффициента
усиления, которое обеспечивает удовлетворение условия ![]() .
.
 .
.
Принимаем
![]() и
и ![]() ;
;
Тогда
![]() ;
;
![]() .
.
Корректируем ОЛАЧХ неизменяемой
части системы при помощи последовательного корректирующего устройства. Затем
сдвигаем полученную ОЛАЧХ вниз до пересечения ее с ОЖЛАЧХ при частоте ![]() . Находим
частоту
. Находим
частоту ![]() и
соответствующую ей постоянную времени, при которой пересекаются ОЛАЧХ
неизменяемой части и ОЖЛАЧХ следящей системы. Рис 5б на
дополнительном чертеже
и
соответствующую ей постоянную времени, при которой пересекаются ОЛАЧХ
неизменяемой части и ОЖЛАЧХ следящей системы. Рис 5б на
дополнительном чертеже
![]() ;
; ![]() .
.
По передаточной функции последовательного корректирующего устройства, пользуясь справочными данными, выбираем схему последовательного корректирующего устройства. Принципиальная схема последовательного корректирующего устройства имеет вид (см. рис.6.):
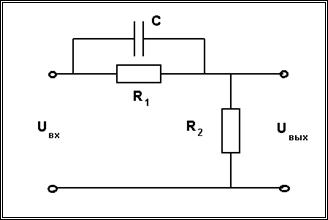
Рис.6.
Передаточная функция имеет вид:
 ;
;
 ;
; ![]() ;
;  ;
; ![]() .
.
Расчет параметров:
![]() ;
;
![]() .
.
Пусть ![]() .
.
Тогда
![]() ;
;
![]() .
.
5.2 Синтез параллельного корректирующего устройства
Потребуем, чтобы ![]() равнялась
равнялась ![]() . Реализация
метода ОЖЛАЧХ предполагает, что ОЛАЧХ разомкнутой скорректированной системы
должна совпадать с ОЖЛАЧХ, которая построена с учетом заданных показателей
качества регулирования. При этом, безусловно, и передаточные функции
скорректированной САУ и ОЖЛАЧХ должны быть равны.
. Реализация
метода ОЖЛАЧХ предполагает, что ОЛАЧХ разомкнутой скорректированной системы
должна совпадать с ОЖЛАЧХ, которая построена с учетом заданных показателей
качества регулирования. При этом, безусловно, и передаточные функции
скорректированной САУ и ОЖЛАЧХ должны быть равны.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Допустим:
![]() ;
; ![]() ;
;
Тогда
![]() ;
; ![]()
![]() ;
;
![]() ;
;
Допустим
![]() ,
,
Тогда
![]() ;
;
Коэффициент обратной связи по скорости:
![]() .
.
Коэффициент обратной связи по току:
![]() .
.
Реализация такого параллельного корректирующего устройства предполагает соединение двух звеньев со следующими передаточными функциями:
![]() - разделительное звено;
- разделительное звено;
![]() - интегро-дифференцирующее звено.
- интегро-дифференцирующее звено.
По полученным передаточным функциям параллельного корректирующего устройства, пользуясь справочными данными, выбираем схему параллельного корректирующего устройства (см. рис.6). [5]
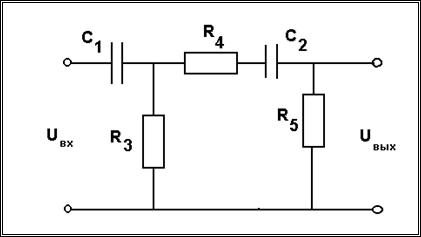
Рис.6.
Расчет параметров:
![]() .
.
Пусть ![]() , тогда
, тогда
![]() .
.
![]() ;
;
![]() .
.
Пусть ![]() , тогда
, тогда
![]() .
.
![]() .
.
6. Проверка устойчивости внутреннего контура системы
Запас устойчивости внутреннего
контура определяется для ![]() и
и ![]() , то есть для частот, при которых
ЛАЧХ исходной нескорректированной системы пересекается с желаемой ЛАЧХ. Запас
устойчивости при
, то есть для частот, при которых
ЛАЧХ исходной нескорректированной системы пересекается с желаемой ЛАЧХ. Запас
устойчивости при ![]() обеспечивается всегда, поэтому
рассматривают для оценки запаса устойчивости внутреннего контура частоту
обеспечивается всегда, поэтому
рассматривают для оценки запаса устойчивости внутреннего контура частоту ![]() . Поэтому
значение
. Поэтому
значение ![]() определяется
при частоте
определяется
при частоте ![]() .
.
Запас устойчивости внутреннего контура:
![]() ;
;
![]() ;
;
|
|
|
|
|
|
|
|
|
|
| 0,41 | 0,165 | 87,09 | 0.6 | 0.007 | 0.0725 | 3 | 0.018 | 0.2188 |
![]() .
.
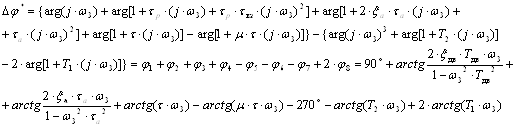
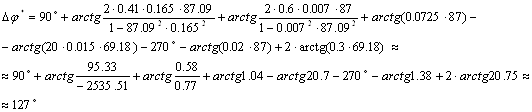
7. Проверка устойчивости системы в целом
Обратная передаточная функция скорректированной системы:
![]() .
.
Поскольку мною будет получена ОЛФЧХ разомкнутой скорректированной системы, то поведение ЛФЧХ буду рассматривать в области wср не по отношению к линии -p, а по отношению к линии +p.
Разомкнутая система считается устойчивой, если для последовательного соединения звеньев имеется информация, что каждое из звеньев устойчиво.
В тех случаях, если в систему
вводятся местные обратные связи и образуются внутренние контуры, необходимо
оценить устойчивость этих внутренних контуров. Если внутренние контуры
устойчивы, то наша система будет представлять собой последовательное соединение
устойчивых звеньев, а, значит, разомкнутая система устойчива. В соответствии со
второй формулировкой логарифмического амплитудо-частотного критерия, если
разомкнутая система устойчива и в замкнутом состоянии, а ее ЛФЧХ имеет
пересечение линии -p до частоты wср, если разность между числом
отрицательных и положительных переходов ЛФЧХ через линию -p на отрезке частот ![]() равна 0, а на участке
равна 0, а на участке ![]() ЛФЧХ
пересекает линию -p правее wср (при частоте wp).
ЛФЧХ
пересекает линию -p правее wср (при частоте wp).
Строим логарифмическую фазо-частотную характеристику всей системы в целом, и определяем запасы устойчивости по фазе и амплитуде. ЛФЧХ показано на рис.7.
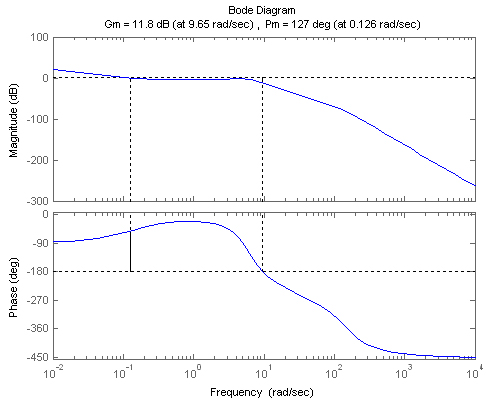
Спроектированная система обладает достаточными запасами устойчивости.
8. Расчет элементов следящей системы
Коэффициент усиления разомкнутой системы:
![]() .
.
Коэффициент передачи обратной связи по току:
![]() .
.
Из справочных данных выбираем сельсин-датчик и сельсин-приемник.
Сельсины-датчики и сельсины-приемники выбирают таким образом, чтобы их параметры были близки друг к другу. В качестве сельсина-датчика, сельсина-приемника выбираем сельсины типа БД150, БС151 соответственно с параметрами:
![]() – номинальное напряжение
сельсинов;
– номинальное напряжение
сельсинов;
![]() – коэффициенты трансформации СД и СП.
– коэффициенты трансформации СД и СП.
Находим крутизну сигнала ошибки, определяемую крутизной измерителей угла рассогласования между сигналами входного и выходного поворотных трансформаторов.
![]() ;
;
![]()
Определяем суммарный коэффициент усиления сигнала в цепи ошибки:
![]()
В качестве электронного усилителя
выбираем УПТ-3 с коэффициентом усиления: ![]() .
.
Коэффициент усиления фазочувствительного выпрямителя:
![]() .
.
Определяем коэффициент передачи ОС по скорости:
![]() .
.
Коэффициент обратной связи по току:
![]() .
.
Коэффициент с определяем по построению ОЖЛАЧХ :
![]() ;
;
![]() ;
;
![]()
Определяем коэффициент передачи тахогенератора:
![]()
Переводим в мВ/об/мин:
![]()
По справочнику выбираем тахогенератор ТГ –1 с техническими данными:
nном=1100 об/мин;
КТГ=0.42 мВ/об/мин;
Сопротивление RC выбирается
![]() ;
;
![]() ;
;
![]() .
.
![]() .
.
![]() .
.
![]() .
.
9. Расчет переходного процесса
В процессе анализа системы автоматического управления определяются показатели качества, по которым и судят о свойствах и работоспособности системы. Удовлетворение необходимых показателей качества САУ является достаточным условием работоспособности системы.
Показатели качества управления при единичном ступенчатом воздействии на входе системы определяются путем анализа кривой переходного процесса. К основным показателям качества относятся быстродействие (длительность переходного процесса), перерегулирование и др.
Переходной процесс представляет собой такое состояние системы, при котором происходят непрерывные, последовательные изменения параметров режима, обусловленные изменением начальных условий или появлением возмущающих воздействий и приводящее к отклонению режима от его установившегося значения.
Переходный процесс характеризуется качеством управления, которое во многом определяет качество САУ в целом, поэтому наряду с анализом системы на устойчивость, неотъемлемой частью проектирования любой САУ является построение переходного процесса.
При построении переходного процесса используем следующую схему замкнутой системы автоматического управления (см. рис.8):

Рис.8.
В данном курсовом проекте переходной процесс системы автоматического управления построен с помощью программы MATLAB (см. рис.9).
» w1=tf(912, [0 1 0]); - выводит на экран передаточную
функцию ![]() .
.
» w2=tf([0 0.2188 1],[0 1.41 1]); - выводит на экран
передаточную функцию ![]() .
.
» w4=tf([0 0.2188 1],[0 1.41 1]); - выводит на экран
передаточную функцию ![]() .
.
» w5=tf(1,[0 0.02 1]); - выводит на экран передаточную
функцию ![]() .
.
» w6=tf(1,[0 0.011 1]); - выводит на экран передаточную
функцию ![]() .
.
» w7=tf(1,[0 0.011 1]); - выводит на экран передаточную
функцию ![]() .
.
>>w3=tf(1,[0 0.011 1]); - выводит на экран передаточную
функцию ![]() .
.
» w=w1*w2*w3*w4*w5*w6*w7; - выводит на экран передаточную функцию разомкнутой скорректированной системы.
 .
.
» Wzs=feedback(w,1); - выводит на экран передаточную функцию замкнутой скорректированной системы

![]() .
.
» T=[0:0.001:1]; - задаем время Т.
» step(Wzs,T) – строим переходной процесс.
» grid on – включаем сетку.
» dt=[0:0.05:1];
» [dx t]=step(Wzs,dt);
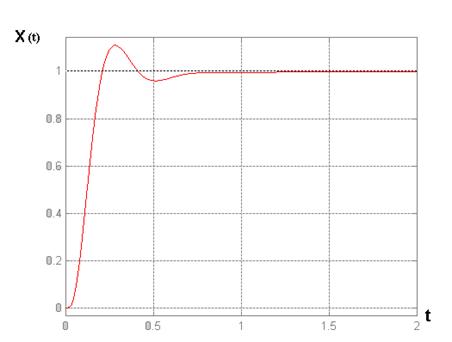
Рис.9.
Определим показатели качества системы и сравним их с заданными.
Быстродействие определяется
длительностью переходного процесса. Переходный процесс длится бесконечно долго.
На практике считают, что переходной процесс закончился, если в дальнейшем
отклонение выходной величины ХВЫХ от установившегося значения ХВЫХ
уст не превышает 3¸5%. ![]() . Перерегулирование:
. Перерегулирование:
![]() .
.
Заключение
В ходе курсового проектирования был выполнен синтез следящей системы с неизменяемой частью ЭМУ-Д и обратной связью по току и скорости.
В курсовом проекте представлено математическое описание проектируемой системы, произведен синтез и рассчитаны параметры последовательного и параллельного корректирующих устройств, выбраны и рассчитаны элементы, обеспечивающие обратные связи.
В проекте представлен расчет запаса устойчивости, как внутреннего контура, так и всей системы в целом. Результаты расчета показывают, что спроектированная система является устойчивой.
Также в проекте произведен расчет переходного процесса. Результаты расчета позволяют сделать вывод о качестве управления. Из спроектированной системы видно, что она обладает достаточными запасами устойчивости как по фазе так и по амплитуде.
Перерегулирование
синтезированной системы меньше заданного ![]() .
.
Список литературы
1. А.Н. Ткаченко. Судовые системы автоматического управления и регулирования. Учебное пособие. – Л.: Судостроение, 1984. – 288 с., ил.
2. А.В. Нетушила. Теория автоматического управления. Учебник для вузов. Изд. 2-е, доп. и перераб. М., «Высшая школа», 1976.
3. А.Н. Ткаченко, А.П. Гуров, Н.Т. Шаповалов. Методические указания по курсовому проектированию по курсу судовые системы автоматического управления. – Н., 1981.
4. А.А. Воронов. Основы теории автоматического регулирования и управления. – М., Высшая школа, 1977.
5. В.Ф. Михайлов. Судовая электроавтоматика. – Л., Судостроение, 1970.
| Проектирование привода горизонтального канала наведения и стабилизации ... | |
|
Министерство общего и профессионального образования РФ Тульский государственный университет Кафедра автоматики и телемеханики Проектирование привода ... Вид передаточной функции фильтра и её параметров выберем исходя из тех же требований: обеспечение запаса по фазе разомкнутой системы в пределах 300`600 и максимально-возможной ... Таким образом, вид передаточной функции разомкнутой системы "фильтр-двигатель-вал-нагрузка" примет следующий вид: |
Раздел: Рефераты по коммуникации и связи Тип: дипломная работа |
| Психологический словарь | |
|
Борис Гурьевич Мещеряков, Владимир Петрович Зинченко Большой психологический словарь Оглавление Предисловие Персоналии Список авторов Список ... Только во внутреннем плане можно одновременно симультанно представить прямое и обратное действия, в то время как во внешнем материальном плане прямое и обратное ему действие можно ... Пусть m - число возможных альтернатив стимула (и ответов), P - наблюдавшаяся частота правильных ответов, тогда p, т. е. скорректированная частота правильных ответов, вычисляется по ... |
Раздел: Рефераты по психологии Тип: книга |
| Исследование систем автоматического управления (САУ) | |
|
Курсовая работа По курсу "Теория автоматического управления" На тему: "Исследование систем автоматического управления (САУ)" Задание. 1 вариант Рис.1 ... 3.2 Дифференциальное уравнение и передаточная функция разомкнутой САУ В дальнейшем будем предполагать, что САУ состоит из измерительного устройства, исполнительного устройства и объекта управления с общей передаточной функцией W(S) и ... |
Раздел: Промышленность, производство Тип: курсовая работа |
| ... обслуживания и ремонта карбюраторов двигателей легковых автомобилей | |
|
Введение Самый перспективный бизнес на рынке техники - автосервис. Спрос на автосервис постоянно увеличивается. Парк автомашин будет расти еще много ... Для защиты двигателя от чрезмерного повышения частоты вращения коленчатого вала, что может быть при работе двигателя без нагрузки, в системе питания предусматривают ограничитель ... Электронный блок 2 управления представляет собой устройство, электронная схема которого в зависимости от частоты вращения - частоты электрических импульсов, поступающих от системы ... |
Раздел: Рефераты по транспорту Тип: дипломная работа |
| Проект электрокотельной ИГТУ | |
|
Содержание 1. Введение 1.1 Энергетика Иркутской области, перспективы развития 2. Общая часть 2.1 Краткая характеристика объекта и источников ... Наименьший ток, вызывающий отключение автоматического выключателя, называют током срабатывания, а настройку расцепителя автоматического выключателя на заданный ток срабатывания ... Для определения тока срабатывания защиты используют условие отстройки от емкостного тока электродвигателя: , где КН=1.2 - коэффициент надёжности КБР=3 - коэффициент отстройки от ... |
Раздел: Рефераты по физике Тип: дипломная работа |